随着科学技术的发展,机器人逐渐从荧幕上走入现实,但要达到影视中那样的智能和高端还尚需一段时间。个人看来,最符合我们对机器人印象的研发机构当属波士顿动力,该公司每年发布的机器人视频都足以震撼人们的眼球,与现实中人的运动能力越来越贴近。这一系列文章将深入学习波士顿动力机器人的技术细节……继续阅读 » 挽风 5年前 (2021-04-26) 2458浏览 0评论1246个赞
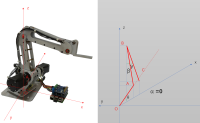
本篇文章主要介绍详细介绍如何使用MATLAB机器人工具箱进行机械臂的正逆运动学求解以及轨迹规划,全文附完整的MATLAB程序,本文主要分六部分进行介绍:一、使用改进型DH法建立机械臂模型,二、正运动学求解,……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2688浏览 0评论1501个赞
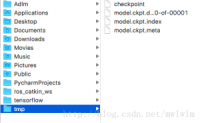
问题 把模型放到home目录下的~/.gazebo中,gazebo就会自己找到模型的路径,自动链接. 但是常常我们的project在不同的平台运行时依然需要重新将模型拷贝一次,我常常会觉得很苦恼,直接在同一个project中会带来很大便利. &nb……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 1919浏览 0评论1741个赞
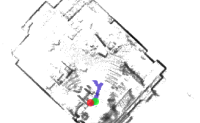
在用机器人和激光雷达跑SLAM算法构建地图时,总感觉激光雷达数据在RVIZ中显示的方向有问题(前提是激光雷达的安装方向正确),知道是tf坐标转换存在问题,但一直没有调整到好的状态,所以查了些相关资料,终于搞明白了ROS中的坐标转换是怎么回事,于是记录下来。 ……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 1822浏览 0评论246个赞
首先说一下我的心得: 1. 我认为KDL的精髓是Spatial Vector,结合C++等面向对象的语言可以写出较好的软件。 2. 直接阅读KDL代码不适合初学者学习机械臂动力学。 3. 要学习机械臂动力学的话应首先阅读使用3维向量推导公式的文献,也就是线速度和角速……继续阅读 » gpeng832 5年前 (2021-04-26) 3302浏览 0评论2648个赞
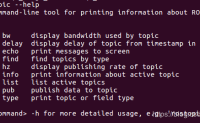
文章目录 ① 背景Ⅰ什么手机ROS 2 包Ⅱ ROS 2 包有什么组成cmake 包py……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 2365浏览 0评论2376个赞
解决IAR for msp430的工程文件报xxx.sfr文件有问题的warning现象 最近在开发Ti的msp430f5529的……继续阅读 » better_coder 5年前 (2021-04-26) 3551浏览 0评论278个赞
Moveit的前身是PR2机器人的机械臂的代码包,之后被集成为一个软件包。它不仅可以实现单个机械臂的控制。而且可以实现两个机械臂的协调控制。而且可以RGB摄像头采集外部障碍物信息,完成自主避障这样的功能。由一系列移动操作的功能包组成,运动规划,操作控制,3D感知,运动学,控制与导……继续阅读 » 小小何先生 5年前 (2021-04-26) 2743浏览 0评论1581个赞
文章目录① 背景② 前提③ 任务……继续阅读 » LiAr 5年前 (2021-04-26) 2305浏览 0评论2004个赞
首先了解在导航堆中,move_base包与其它包(如amcl、map_server)的关系,如图所示……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2189浏览 0评论2833个赞
……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 3277浏览 0评论1604个赞
本文记录使用 Kalibr 标定双目相机内外参数以及和IMU之间外参数的标定过程. 采用的硬件设备为小觅的双目VIO设备( MyntEYE), 并且默认你已经有了ROS的知识基础. 标定 stereo-imu 之前, 需要知道双目的内外参数, 所以先进行双目内外参数……继续阅读 » 白巧克力亦唯心 5年前 (2021-04-26) 3506浏览 0评论1082个赞
在ROS中点云的数据类型 在ROS中表示点云的数据结构有: sensor_msgs::PointCloud ……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 3119浏览 0评论2436个赞
0.前言 昨天看了关于SLAM的综述文章一篇,对于其中提到的SIFT,SURF,ORB三种特征提取匹配的方法,非常想要实践学习其Python的编写方法。同时我爸让我帮他写一个树莓派(raspberry pi)检测黑点的程序,黑点有什么好检测的(╯•̀ὤ•́……继续阅读 » Eminbogen 5年前 (2021-04-26) 3068浏览 0评论2468个赞
在Tensorflow中所有的数据都是使用tensor来描述的,不管是变量,常量,placeholder等都是一个tensor,tensor的中文翻译是张量,也就是我们在进行tensorflow编程的时候所有的输入输出都是一个tensor,这一点非常重要的。 下图是……继续阅读 » DiegoRobot 5年前 (2021-04-26) 2393浏览 0评论225个赞
1.pcl_tutorial官方给的模板 int main(int argc, char** argv){ pcl::PC……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 1982浏览 0评论1335个赞
Tensorflow中的变量就是一个放在内存中的tensor结构,用于在计算过程中保存数据,变量的数值可以保存到文件中,也可以从文件中读取 1.变量的初始化 ……继续阅读 » DiegoRobot 5年前 (2021-04-26) 1724浏览 0评论1116个赞
STM32标准库和HAL库的比较使用STM32芯片的时候呢,大家可能都喜欢用库,什么标准库啦,……继续阅读 » better_coder 5年前 (2021-04-26) 3318浏览 0评论473个赞
之前为了提升svo的鲁棒性,进行了一些不同的尝试,虽然稳定性有所提升,两个视频demo在下面,但依然不尽人意。 效果1 (svo基础上添加了edgelet feature) &n……继续阅读 » 白巧克力亦唯心 5年前 (2021-04-26) 2381浏览 0评论1378个赞
有限状态机它代表有限数量的状态以及各个状态之间进行跳转的动作。举个例子来说,我们现在……继续阅读 » better_coder 5年前 (2021-04-26) 3261浏览 0评论681个赞
前言 最近学习稠密重建的相关知识,发现变分法通常作为一个平滑的正则项出现在残差平方和的损失函数中。而图像处理中……继续阅读 » 白巧克力亦唯心 5年前 (2021-04-26) 2330浏览 0评论284个赞
更多创客作品,请关注笔者网站园丁鸟,搜集全球极具创意,且有价值的创客作品 ROS机器人知识请关注,……继续阅读 » DiegoRobot 5年前 (2021-04-26) 2392浏览 0评论2168个赞
这里放了一个小强机器人的bag和我自己的bag包,以供大家测试。 链接:https://pan.baidu.com/s/1GF5FNFIKiRV3wbmBH3HwWQ 提取码:668d 前提: 1.需要三维激光启动节点,发布/points……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 1967浏览 0评论1477个赞
基于快速扩展随机树(RRT / rapidly exploring random tree)的路径规划算法,通过对状态空间中的采样点进行碰撞检测,避免了对空间的建模,能够有效地解决高维空间和复杂约束的路径规划问题。该方法……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2338浏览 0评论2124个赞
Arduino智能小车系列教程1——智能小车拼……继续阅读 » 懒小象 5年前 (2021-04-26) 2373浏览 0评论1264个赞
在前述文篇《解构波士顿动力机器人(一)》中简述了BigDog的技术原理,然而“踹不倒”、在复杂地形行走的运动控制却是技术核心。本文将从Little Dog机器人为本体,分析运……继续阅读 » 挽风 5年前 (2021-04-26) 3044浏览 0评论1151个赞
URDF(Universal Robot Description Format)——通用机器人描述格式,它是ROS里边使用的一种机器人的描述文件,包含的内容有:连杆、关节,运动学和动力学参数、可视化模型、碰撞检测模型等。 到目前为止,本……继续阅读 » gpeng832 5年前 (2021-04-26) 3149浏览 0评论598个赞
最近由于需求,需要自定义一些topic格式进行数据的处理。基于常见的数据类型:int32 flosat32 bool 等可以定义出需要的消息格式。 如:example.msg ……继续阅读 » bbtang5568 5年前 (2021-04-26) 2031浏览 0评论1281个赞
前言: 已入强化学习一个学期了,发现自己急需一个物理环境来进行训练机器人,前前后后参考过过许多环境,但是最后选择了Unity3D,这是因为其足够简单,不用费很大的功夫就可以建立一个简易的机器人,只需要编写C#脚本和tensoflow进行通讯,立马就……继续阅读 » JameScottX 5年前 (2021-04-26) 1846浏览 0评论2676个赞
Error: L6406E: No space in execution regions with .ANY selector matching问题描述……继续阅读 » better_coder 5年前 (2021-04-26) 1841浏览 0评论1495个赞
搜索区域 ……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2696浏览 0评论1304个赞
Arduino智能小车系列教程 Arduino智能小车系列教程1——拼装篇Arduino智能小车系列教程2——测试篇……继续阅读 » 懒小象 5年前 (2021-04-26) 1680浏览 0评论2745个赞
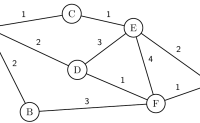
1. 算法简介 Catmull-Rom Spline算法是一种插值算法,能够在目标点之间插值生成一条平滑的曲线 算法数学原理不在此介绍 算法特点 什么情况下,可以使用Catmull-Rom Spline算法呢——平滑机器人或无人车的路径 ……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 3034浏览 0评论557个赞
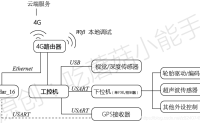
室外低速自动导航车的设计(1)——基础硬件配置 今天我们来开始做基于GPS和16线激光雷达的低速导航车项目。 因为不论做什么车,首先都要把硬件搭建起来,除了基础的机械机构(骨架和壳子)之外,基本的传感器,车轮的驱动器以及工控机都是要有的。 ……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 3259浏览 0评论2763个赞
代码是最为耐心、最能忍耐和最令人愉快的伙伴,在任何艰难困苦的时刻,它都不会抛弃你(开场白) 长时间不写博客,我总感觉自己没有做事情,最近一直在做目标检测,想结合一下双目视觉,做立体检测,于是就研究了一下双目视觉,参考了很多人的相关博客,在这里,特意表示感谢一下。 使用Opencv……继续阅读 » xiaorun 5年前 (2021-04-26) 2793浏览 0评论1144个赞
Arduino智能小车系列教程4——调速篇 Arduino智能小车系列教程 ……继续阅读 » 懒小象 5年前 (2021-04-26) 2165浏览 0评论2643个赞
LOAM-Livox是针对livox-LiDAR的一个激光里程计和建图(LOAM)的功能包 Loam-Livox是一个适用于 Livox LiDAR 强大的、低漂移实时的里程计和建图功能包 Livox LiDAR……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 2286浏览 0评论2162个赞
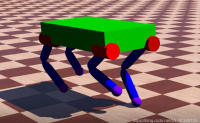
前言: 之前在Unity3D中尝试训练四足机器人学习奔跑前进,只是做了简单的尝试。在19年的寒假里由于要写论文,所以基于强化学习提出一种分层学习算法,实现四足机器人在腿瘸后仍可以继续向前运动。这种是一种比较简单的,所以也就只发表在国内的核心期刊上面。这也是我第……继续阅读 » JameScottX 5年前 (2021-04-26) 2416浏览 0评论1848个赞
Arduino智能小车系列教程4——超声波避障 Arduino智能小车系列教程 &nbs……继续阅读 » 懒小象 5年前 (2021-04-26) 3587浏览 0评论2366个赞
前言 前段时间说到小编手里有两个传感器,6个激光雷达与摄像头,还有一个微波摄像头,分别装在一个路口的不同地方,需要将这些传感器进行融合输出目标列表。但是要做到融合首先第一步就是标定,做空间同步,第二是时间同步。 接下来我以激光雷达与摄像头为例,其中激光……继续阅读 » xiaorun 5年前 (2021-04-26) 3510浏览 0评论2942个赞
写在前面我最近在调试购物车的底盘,底盘上有一个光电传感器,是通过串口……继续阅读 » better_coder 5年前 (2021-04-26) 2796浏览 0评论2369个赞
前言 一个二维的 marker 通常有四个角点,如果把四个角点当做独立的三维特征点去参与BA优化,那么需要十二个参数,并且四个角点之间的约束(边长以及正交)还不好加入优化。这篇博客是将一个marker用6自由度的坐标系进行建模,推导了整个Marke……继续阅读 » 白巧克力亦唯心 5年前 (2021-04-26) 3002浏览 0评论2688个赞
室外低速自动导航车的设计(2)——多线激光雷达的点云解析 我们在前面硬件系统的构建中通过网络接收到了多线激光雷达的原始数据,这些数据在空间中形成了一个个的点,每一个点都代表了某个物体表面的回波。我们采用的激光雷达是……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 3252浏览 0评论1517个赞
注意:本文下载的tensoflow/model版本比较旧,是18年的版本,现在github上有更新,对代码和文件结构进行了一定的优化,因此下文的流程使用起来可能会与最新版本有所差异,大家要根据官方介绍灵活设置 1 源代码测试……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2290浏览 0评论251个赞
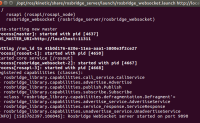
首先,根据不同的雷达,了解雷达发布的点云消息。(IMU也是一样,了解IMU发布的点云topic)。 本文使用的是Robosense 16线激光雷达,暂时未使用IMU(建议6轴,再加上GPS定位精度会高很多)发布PointCloud2类型的消息默认的topic为rslidar_po……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2589浏览 0评论2518个赞




![[ros2学习]-Client Libraries – 创建第一个自己的ROS 2 包](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200403165048213.gif#pic_center&h=123&w=200&q=90&zc=1&ct=1)

![[ros2学习]-CLI Tools – 记录和播放数据](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/2020040219203114.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl8zNjYyODc3OA==,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)