仿真机器人加真实机器人功能包下载链接https://download.csdn.net/download/qq_4214……继续阅读 » 很不专业 5年前 (2021-04-26) 3483浏览 0评论1717个赞
封面就是我的双目相机了 —— MYNT EYE D小觅双目摄像头深度版系列结构光双目深度惯导相机。之后会做测评的视频?或者博客吧~ 下面还是重头戏,看了上一期 ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 3116浏览 0评论2454个赞
单目稠密重建和深度滤波器的内容我已经总结在了上一个学习笔记中(SLAM14讲学习笔记(九)单目稠密重建、深度滤波器详解与补充(纠正第13讲 建图 中的错误)),因为在那一部分内容中高博讲的……继续阅读 » 微鉴道长 5年前 (2021-04-26) 1893浏览 0评论260个赞
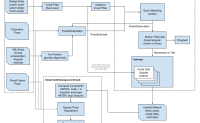
首先了解在导航堆中,move_base包与其它包(如amcl、map_server)的关系,如图所示……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 3694浏览 0评论1837个赞
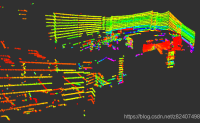
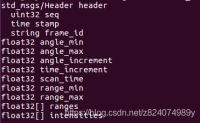
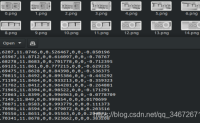
室外低速自动导航车的设计(2)——多线激光雷达的点云解析 我们在前面硬件系统的构建中通过网络接收到了多线激光雷达的原始数据,这些数据在空间中形成了一个个的点,每一个点都代表了某个物体表面的回波。我们采用的激光雷达是……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 2869浏览 0评论1275个赞
在一台机器人中不可避免地会具有很多种传感器(雷达,视觉,深度…);在机器人的导航中对这些传感器的融合,并形成完整的导航策略是很关键的。对于一台室内/室外机器人来讲,传感器的融合主要分为两个方面:融合定位,使用GPS/IMU/里程计/视觉/……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 2098浏览 0评论2421个赞
Real-Time Loop Closure in 2D LIDAR SLAM文章精读原文:W. Hess, D. Kohler, H. Rapp, and D. Andor, Real-Time Loop Closure in 2D LIDA……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 3000浏览 0评论2385个赞
AMCL首次启动总有个烦恼的问题,就是手动初始化位姿很难给出准确的,也不会自动更新,像下面这样 像这样做成产品当然不行啦。解决上面的问题主要有两个思想(1)用户给个大概初始位姿,算法自动更新寻找真实值(2……继续阅读 » yuanguobin01 5年前 (2021-04-26) 3495浏览 0评论602个赞
问题的引出:AMCL的初始位姿通常要求用户手动输入,或者机器加载上一次保存的位姿。AMCL中自带的全局定位服务(globalLocalizationCallback)实际中基本很难用得上。问题解决思路:相机……继续阅读 » yuanguobin01 5年前 (2021-04-26) 3237浏览 0评论1167个赞
A. 标准层 Static Map Layer:为了做全局规划,机器人需要一个超越其传感器的地图,以了解墙壁和其他静态障碍物的位置。 静态地图可以先用SLAM算法生成,也可以从架构图中……继续阅读 » LiAr 5年前 (2021-04-26) 2613浏览 0评论1951个赞
准备工作安装桌面完整版ROSsu……继续阅读 » 初霁 5年前 (2021-04-26) 3613浏览 0评论2021个赞
local costmap empty using move_base_node|turtlebot_stage在我运行roslaunch turtlebot_stage turtlebot_in_stage.la……继续阅读 » windSeS 5年前 (2021-04-26) 2759浏览 0评论1377个赞
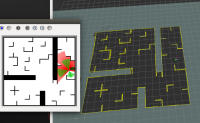
文章目录A 路径规划定义B 构型/位型空间(configuration Space)C 障碍物与构型空间C 环境模型建立D 欧氏距离与曼哈顿……继续阅读 » 二进制人工智能 5年前 (2021-04-26) 2854浏览 0评论891个赞
Dijkstra算法Dijkstra算法是从一个节点到区域各节点的最短路径算法,解决的是最短路径问题。特点:以起点为中心,向外层层扩展,直到扩展到终点为止。……继续阅读 » 二进制人工智能 5年前 (2021-04-26) 3302浏览 0评论1090个赞
Aster(A*)算法Aster算法是在Dijkstra算法基础上发展出来的,是在静态路径中用于求解最优路径有效的直接搜索算法,比dijkstra算法多了一个启发式的搜索函数,也就是通过一个代价函数来确定搜索方向(从起点开始向周围扩张,通过代价函数,计……继续阅读 » 二进制人工智能 5年前 (2021-04-26) 2788浏览 0评论1877个赞
本人为了对比研究三大经典SLAM算法(Gmapping、Cartographer、Hector)的优缺因此考虑在Turtlebot3仿真环境下对这三个SLAM算法进行测试。没想到测试第一个算法(Google的cartographer)就花……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 1978浏览 0评论789个赞
一、前言该篇为本文的重点,主要内容为cartographer_turtlrbot3源码库的安装二、cartographer_turtlebot源码库安装这里基本参考创客智造的安装教程,但是由于教……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 3443浏览 0评论1855个赞
0x00 概述在前面的文章中,我们介绍如何自动导航时,都是基于使用gmapping或者hector_mapping创建的地图。当然使用其他的建图方法创建的地图也可以,但是目前为止,无论使用哪种建图方法。通过激光雷达或深……继续阅读 » ROS小课堂 5年前 (2021-04-26) 2576浏览 0评论1953个赞
……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 3235浏览 0评论130个赞
*转载请注明出处 @梦凝小筑前言 ……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 2697浏览 0评论2866个赞
使用octomap_server创建八叉树地图和栅格地图说明问题1:点云与网格垂直问题2:八叉树显示不完整问题3:地面……继续阅读 » lovely_yoshino 5年前 (2021-04-26) 2909浏览 0评论1363个赞
在观看某机器人的视频时,我们看到了这样一个场景:……继续阅读 » troy. 5年前 (2021-04-26) 2597浏览 0评论2373个赞
*转载请注明出处 @梦凝小筑1.2 Cartographer 源码软件结构 Cartographer 的源码中,主要有两大部分:&n……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 2522浏览 0评论1629个赞
1 如何安装……继续阅读 » robinvista 5年前 (2021-04-26) 3700浏览 0评论1596个赞