……继续阅读 » 古月 5年前 (2021-04-26) 1982浏览 0评论1570个赞
……继续阅读 » 古月 5年前 (2021-04-26) 2280浏览 0评论889个赞
……继续阅读 » 古月 5年前 (2021-04-26) 2632浏览 0评论1083个赞
……继续阅读 » 古月 5年前 (2021-04-26) 3401浏览 0评论346个赞
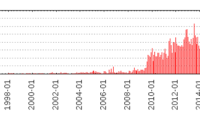
ROS已经走过11个年头,伴随机器人技术的大发展,ROS也得到了极大的推广和应用。尽管还存在不少局限性,但依然无法掩盖ROS的锋芒,社区内的功能包还是呈指数级逐年上涨,为机器人开发带来了巨大的便利。 ……继续阅读 » 古月 5年前 (2021-04-26) 1927浏览 0评论1804个赞
~欢迎关注~微信公众号:古月居新浪微博:古月春旭知乎专栏:古月居 gaz……继续阅读 » 古月 5年前 (2021-04-26) 3093浏览 0评论839个赞
教程演示环境为Windows+ROS2,过程和方法同样适合MacOS和Linux。 ros2的常用命令如下所示: ……继续阅读 » zhangrelay 5年前 (2021-04-26) 1852浏览 0评论543个赞
前序:ROS 2| 节点 -nodes- ……继续阅读 » zhangrelay 5年前 (2021-04-26) 1899浏览 0评论1907个赞
前序:ROS 2| 主题 -topics- <……继续阅读 » zhangrelay 5年前 (2021-04-26) 3129浏览 0评论1380个赞
前序:ROS 2| 服务 -services- 本节详细介……继续阅读 » zhangrelay 5年前 (2021-04-26) 2354浏览 0评论1509个赞
前序:ROS 2 | 参数-parameters- 本节详……继续阅读 » zhangrelay 5年前 (2021-04-26) 3162浏览 0评论1436个赞
前序:ROS 2 | 启动-launch- ROS 2工具……继续阅读 » zhangrelay 5年前 (2021-04-26) 3214浏览 0评论1133个赞
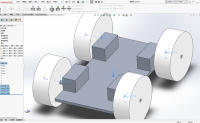
早在2015年,ROS就已经发布了第一个ROS2.0的alpha版本,现在已经发布有五个正式版了。考虑到要与时俱进嘛,所以就安装了ROS2和gazebo来学习下ROS2相关的操作,过来和大家分享下。 安装ROS2……继续阅读 » 谦墨 5年前 (2021-04-26) 3123浏览 0评论986个赞
初学者(入门级)教程是分步说明ROS2使用的资料汇总,目标向初学者介绍ROS 2。建议按顺序学习这些教程,从“普通用户”课程过渡到“开发人员”课程,获取ROS 2的基本知识。……继续阅读 » zhangrelay 5年前 (2021-04-26) 2183浏览 0评论2327个赞
初学者(入门级)教程是分步说明ROS2使用的资料汇总,目标向初学者介绍ROS 2。建议按顺序学习这些教程,从“普通用户”课程过渡到“开发人员”课程,获取ROS 2的基本知识。……继续阅读 » zhangrelay 5年前 (2021-04-26) 3014浏览 0评论1012个赞
上一篇,已经在Gazebo 9中放入了一个支持ROS 2的仿真机器人,具体参考:使用机器人操作系统ROS 2和仿真软件Gazeb……继续阅读 » zhangrelay 5年前 (2021-04-26) 2958浏览 0评论996个赞
在完成教程(一)搭建机器人和(二)命令遥控可视化后,将仿真机器人用于更为逼真的环境,可以测试如……继续阅读 » zhangrelay 5年前 (2021-04-26) 2518浏览 0评论1977个赞
目标跟踪可以使用激光或视觉传感器,本节开始只提供思路,无教程,供有兴趣的朋友自主实践。激光测距视觉识别融合技术……继续阅读 » zhangrelay 5年前 (2021-04-26) 2642浏览 0评论1875个赞
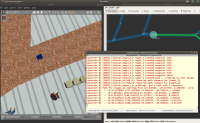
在第三个和第四个案例中,我们依然只使用了一个机器人,毕竟室内环境比较小,为了增加趣味性和竞技效果,通常环境中可以有多个机器人要么竞争或协作完成任务,本实践选用如下场景(aws_bookstore): ……继续阅读 » zhangrelay 5年前 (2021-04-26) 2044浏览 0评论2445个赞
二维激光雷达是室内机器人最常用的距离传感器之一。 结合ROS暑期学校趣味竞赛案例,思考完成如下算法:读取环境基本特征识别特征给出一些关键值……继续阅读 » zhangrelay 5年前 (2021-04-26) 1791浏览 0评论2913个赞
在ROS2课程中已经学过并掌握了一个基本的发布器和订阅器(C++),官网的教程全部掌握大致需要20分钟吧。 这过程包括:创建一个功能包编程实现一个发布节点……继续阅读 » zhangrelay 5年前 (2021-04-26) 3386浏览 0评论999个赞
ROS2在基本概念上与ROS1相似,但是实现上差别较大,比如编程规范等。上一节是主题实战,有兴趣可以编写代码实现机器人速度发布和坐标订阅。……继续阅读 » zhangrelay 5年前 (2021-04-26) 2965浏览 0评论2793个赞
行动(action)比服务更为灵活和复杂。在给出行动具体说明之前,先简要复习一下:主题-服务-行动: ……继续阅读 » zhangrelay 5年前 (2021-04-26) 1850浏览 0评论983个赞
记录下在Ubuntu18中同时安装ROS1&2的主要步骤以及一些小问题,之后遇到新的问题会更新 ROS Melodic……继续阅读 » 谦墨 5年前 (2021-04-26) 3258浏览 0评论2746个赞
workspace是ROS2中的工作空间,也是我们开发机器人代码的位置。 ROS2安装的系统目录称之为“underlay”,我们自己创建的工作空间称之为“overlay”,在一台电脑上往往有多个工作空间。我们可以通过source不同空间的环境变量脚本来更换所使用的w……继续阅读 » 古月 5年前 (2021-04-26) 2147浏览 0评论380个赞
和ROS1一样,ROS2中的各项资源也是通过计算图(“ ROS (2) graph”)联系到一起的。计算图是一个由各种ROS2元素组成的网络,共同完成数据的传输,其中每一个完成具体功能的模块称之为“节点”(Node),例如控制车轮速度、获取雷达数据等,节点之间通过话题(Topic……继续阅读 » 古月 5年前 (2021-04-26) 1888浏览 0评论2683个赞
大道至简,ROS2将复杂的机器人系统拆解成许多模块节点,而这些节点之间则是通过一个至关重要的通道完成数据交换的,这个通道就是“话题”。……继续阅读 » 古月 5年前 (2021-04-26) 3633浏览 0评论1004个赞
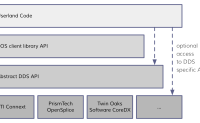
原作者:Michael Ferguson 文章来源:The Robot Report 编译:沈永强 ……继续阅读 » 古月 5年前 (2021-04-26) 2727浏览 0评论827个赞
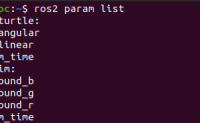
参数也是ROS2中很重要的一个概念,主要作用是对节点功能的配置,在ROS2中,每个节点都有自己的参数,这些参数可以用整型数、浮点数、布尔型数、字符串和列表来描述。 依然是以小海龟仿真器为例,看看里边有哪些参数。 1.启动小海龟仿真器……继续阅读 » 古月 5年前 (2021-04-26) 1837浏览 0评论1322个赞
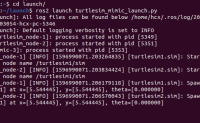
到现在为止,每次启动一个ROS2中的节点,我们都需要开启一个新的终端运行ros2 run指令,如果机器人系统中的节点很多,这样岂不是很麻烦。 ROS2针对这个问题,专门设计了launch启动文件,可以通过一个类似脚本的文件,一起启动多个节点并允许在文件中对节点进行配……继续阅读 » 古月 5年前 (2021-04-26) 2684浏览 0评论2039个赞
ROS2中的工作空间类似我们常说的概念——“工程”,是我们在ROS中开发具体项目的空间,所有功能包的源码、配置、编译都在该空间下完成。 我们可能会同时开发多个项目,就会产生多个工作空间,所以工作空间之间也有一个层次的问题,类似于优先级的概念,比如不同工作空间中有同名……继续阅读 » 古月 5年前 (2021-04-26) 2513浏览 0评论1290个赞
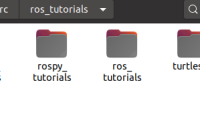
功能包是ROS2中组织代码的基本容器,方便我们编译、安装、分发开发的代码,一般来讲,每个功能包都是用来完成某项具体的功能相对完整的单元。 ROS2中的功能包可以使用CMake或者Python两种方式来编译,其本身是一个“文件夹”,但和文件夹不同的是,每个功能包中都会……继续阅读 » 古月 5年前 (2021-04-26) 3763浏览 0评论1531个赞
节点之间通过服务通信时,发送请求的一端称之为客户端(Client),应答的一端称之为服务器(Server),请求和应答的数据结构使用srv文件描述。 接下来我们就尝试实现一个简单的服务通信模型,客户端发送两个加数,服务器完成加数求和之后应答求和结果。 1.……继续阅读 » 古月 5年前 (2021-04-26) 2763浏览 0评论1676个赞
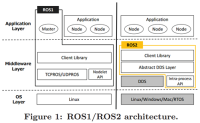
如果不了解ROS 2,推荐先体验一下吧,具体教程:机器人操作系统二(ROS2)- 启程 Departure ROS 2项目的目标是继承ROS 1的优点并改进不合……继续阅读 » zhangrelay 5年前 (2021-04-26) 3934浏览 0评论508个赞
看最新动态,ROS1基本稳定更新维护,ROS2研发进度超快。 现有的ROS1功能包几乎涵盖了所有主流机器人和所有主流机器人学算法,同时这些大部分开源。 未来主流技术主要有如下类别: ……继续阅读 » zhangrelay 5年前 (2021-04-26) 2680浏览 0评论1165个赞
在阅读本文之前,推荐阅读前篇ROS机器人TF基础和全部资料文档: TF基础:https://blog.csdn.net……继续阅读 » zhangrelay 5年前 (2021-04-26) 2648浏览 0评论964个赞
简介 使用机器人操作系统ROS2和机器人中间件框架系统RMF进行多机器人系统集成,高层规划及其应用等。……继续阅读 » zhangrelay 5年前 (2021-04-26) 3115浏览 0评论782个赞
学习ROS2机器人操作系统第一步要做什么呢?下载最新的官方文档到本地: 在github搜索ros2_documentation,使用git或者浏览器下载均可。 ……继续阅读 » zhangrelay 5年前 (2021-04-26) 1891浏览 0评论1148个赞
本文作者:zhangrelay 英文视频教程Foxy: https://www.bilibili.com/video/bv1sD4y1……继续阅读 » zhangrelay 5年前 (2021-04-26) 2581浏览 0评论1247个赞
掌握ROS2内置工具可以更高效的学习和使用其开发机器人软件程序,英文视频如下: https://www.bilibili.com/video/bv1Jg4y1v7vn 本节主要介绍以下阅读自述文件和代码常用的文本工具,提高学习和代码……继续阅读 » zhangrelay 5年前 (2021-04-26) 2213浏览 0评论546个赞
工区/工作区/工作空间(workspace简写为ws)是机器人操作系统核心概念之一。 工作空间是包含ROS 2软件的文件夹。在使用ROS 2之前,必须在正在使用的终端中配置ROS 2工作区(包括系统和局……继续阅读 » zhangrelay 5年前 (2021-04-26) 3385浏览 0评论1900个赞
文章目录 ① 背景② 前提③ 任务 ……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 2264浏览 0评论261个赞
文章目录 ① 背景② 前提③ 任务 ……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 2904浏览 0评论409个赞



















![[ros2学习]-CLI Tools – 配置环境](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=http://images.75271.com/Public/Uploads/2021-04-26/微信图片_20210103191339.png&h=123&w=200&q=90&zc=1&ct=1)
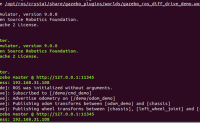
![[ros2学习]-CLI Tools – 了解ROS 2节点(node)](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=http://images.75271.com/Public/Uploads/2021-04-26/微信图片_20201231123920.gif&h=123&w=200&q=90&zc=1&ct=1)