朴素贝叶斯算法 朴素 假定特征与特征之间是相互独立的 贝叶斯公式 公式分为三个部分: P(C):每个文档类别的概率(某文档类别数/总文档数量) P(W│C):给定类别下特征(被预测文档中出现的词)的概……继续阅读 » 清风紫雪 4个月前 (03-18) 2709浏览 0评论2591个赞
本文作者:HelloGitHub-蔡文心 大家好!这里是 HelloGitHub 推出的《讲解开源项目》系列,今天给大家带来的一款基于 Node.js 实现的一文多发平台开源项目——ArtiPub(文……继续阅读 » 削微寒 4个月前 (03-18) 3381浏览 0评论1221个赞
v2.4开始,Creator使用AssetBundle完全重构了资源底层,提供了更加灵活强大的资源管理方式,也解决了之前版本资源管理的痛点(资源依赖与引用),本文将带你深入了解Creator的新资源底……继续阅读 » 深圳-宝爷 4个月前 (03-18) 3190浏览 0评论1165个赞
一、前言 ReactColor 是一个优秀的 React 颜色选择器组件,官方给了多种布局供开发者选择。 笔者常用的主题为 Sketch,这种主题涵盖了颜色面板、推荐色块、RGB颜色输入等功能,比较完……继续阅读 » Jacob是我了 4个月前 (03-18) 1766浏览 0评论2385个赞
本文通过对云计算、云原生、Service Mesh等概念的追本溯源,带你领略下一代微服务架构Istio的演进历程。……继续阅读 » 「圣杰」 4个月前 (03-18) 2058浏览 0评论1357个赞
最近在学习一些检测方面的网络,使用的是pytorch。模型结构可视化是学习网络的有用的部分,pytorch没有原生支持这个功能,需要找一些其他方式,下面总结几种方法(推荐用4)。 1. torch .……继续阅读 » haoliuhust 4个月前 (03-18) 1999浏览 0评论2784个赞
灵感的源泉来源于不断的接受新鲜事物。 Chrome 89 新功能一览,性能提升明显,大量 DevTools 新特性! 文章中的新特性,掌握了对日常开发,很受益,赶紧更新浏览器版本吧。 谈谈其中提到的:……继续阅读 » ESnail 4个月前 (03-18) 1838浏览 0评论886个赞
前言: 随着企业应用的不断迭代,不断扩大,应用的发布发布可能涉及多个团队,如pc端,手机端,小程序端等等。应用发布也就成为了一项高风险,高压力的超过过程,以及应用的开发迭代的沟通,测试成本也大大的变得……继续阅读 » 追逐时光者 4个月前 (03-18) 2031浏览 0评论303个赞
介绍 C++ 的智能指针 (Smart Pointers) 相关 API。 C++ 中的智能指针是为了解决内存泄漏、重复释放等问题而提出的,它基于 RAII (Resource Acquisition……继续阅读 » sinkinben 4个月前 (03-18) 2628浏览 0评论2955个赞
nacos源码分析注册流程……继续阅读 » 努力的小雨 4个月前 (03-18) 2546浏览 0评论1754个赞
openclaw –version 查看版本openclaw status 查看状态openclaw doctor 诊断修复openclaw onboard 配置向导openclaw dashboard 打开控制台openclaw gateway start 启动网关openclaw gateway stop 停止网关opencla……继续阅读 » 开心洋葱 4个月前 (03-11) 3280浏览 0评论1660个赞
采样点是什么? 采样点是接受节点判断信号逻辑的位置,CAN通讯属于异步通讯。需要通过不断的重新同步才能保证收发节点的采样准确。 若采样点太靠前,则因为线缆原因,DUT外发报文尚未稳定,容易发生采样错误……继续阅读 » 戴反帽也有每天在努力 4个月前 (03-10) 1657浏览 0评论2419个赞
关于 setState setState 的更新是同步还是异步,一直是人们津津乐道的话题。不过,实际上如果我们需要用到更新后的状态值,并不需要强依赖其同步/异步更新机制。在类组件中,我们可以通过thi……继续阅读 » 陌上兮月 4个月前 (03-10) 3306浏览 0评论1335个赞
字符串匹配,给定一个文本串S和一个模式串P,如何找到P在S中的位置? BF算法(暴力匹配算法) 思路:假设文本串S匹配到i位置,P匹配到j位置。如果文本串S的i位置的元素与模式串P的j位置的元素相匹配……继续阅读 » 咸鱼的习惯 4个月前 (03-10) 2986浏览 0评论269个赞
前言 注:大概2017年-2018年国内人工智能热度达到顶峰,随后热度开始逐渐减少。2018年前人工智能被投资界、学术界、工业界和媒体炒的特别热,各大企业都想尝试一下深度学习技术在业务场景的应用。试水……继续阅读 » PoJason 4个月前 (03-10) 1900浏览 0评论1399个赞
大家好,我们今天继续来剖析一些推荐广告领域的论文。 今天选择的这篇叫做DeepFM: A Factorization-Machine based Neural Network for CTR Pred……继续阅读 » TechFlow2019 4个月前 (03-10) 2382浏览 0评论2338个赞
点击此处观看完整活动视频 大家好,我是360的王峰,我今天主要通过Cassandra在多场景下的应用来介绍一下Cassandra在360落地的情况。 我会从以下这几个方面进行介绍。首先介绍下Cassa……继续阅读 » DataStax 4个月前 (03-10) 2752浏览 0评论2011个赞
通常情况下,我们都是使用一套kafka集群处理业务。但有些情况需要使用另一套kafka集群来进行数据同步和备份,比如需要更高的 SLA~……继续阅读 » zzzzMing 4个月前 (03-10) 3345浏览 0评论2902个赞
一、简介 Apache Kylin™是一个开源的、分布式的分析型数据仓库,提供Hadoop/Spark 之上的 SQL 查询接口及多维分析(OLAP)能力以支持超大规模数据,最初由 eBay 开发并贡……继续阅读 » Max_Lyu 4个月前 (03-10) 2830浏览 0评论598个赞
Kafka 探险 – 架构简介 这个 Kafka 的专题,我会从系统整体架构,设计到代码落地。和大家一起杠源码,学技巧,涨知识。希望大家持续关注一起见证成长! 我相信:技术的道路,十年如一日!十年磨一……继续阅读 » 徐笔笔 4个月前 (03-10) 3006浏览 0评论2982个赞
网络并发负载均衡 OSI 七层参考模型 分层模型,每一层实现各自的功能和协议,并完成与相邻层的接口通讯。OSI 的服务定义详细说明了各层所提供的服务,某一层的服务就是该层及其下各层的一种能力,通过接口……继续阅读 » ice_image 5个月前 (02-27) 2814浏览 0评论1119个赞
潮汐表表 全新升级一、介绍概述潮汐表表是一款专注于天气和潮汐查询的微信小程序,3.0.0版本重磅推出「去哪」功能,为用户提供周边赶海钓点查询、地点特色展示、导航等一站式服务,旨在成为海边游玩、钓鱼赶海、户外出行的必备神器。二、详细功能🌊 潮汐表表:你的随身天气潮汐小管家,出行游玩必备神器!🌟 为什么你需要潮汐表……继续阅读 » 开心洋葱 7个月前 (12-28) 2757浏览 0评论1288个赞
编译安装SageAttentio时,提示这个错误:Error when trying to install SageAttention – distutils._msvccompiler has no attribute ‘_get_vc_env’ 解决办法:进入环境,输入下面脚本,降下版本,来源开心洋葱……继续阅读 » 开心洋葱 1年前 (2025-03-15) 2275浏览 0评论469个赞
ZGC介绍ZGC(The Z Garbage Collector)是JDK 11中推出的一款追求极致低延迟的实验性质的垃圾收集器,它曾经设计目标包括:停顿时间不超过10ms;停顿时间不会随着堆的大小,或者活跃对象的大小而增加;支持8MB~4TB级别的堆(未来支持16TB)。当初,提出这个目标的时候,有很多人都觉得设计者在吹牛逼。但今天看来,这……继续阅读 » 开心洋葱 5年前 (2021-07-07) 3456浏览 0评论2395个赞
近些年来, Google、Microsoft和Facebook等几大玩家都创建了自己的AI研发团队,并取得了一些令人瞩目的成果。 2015年11月9日,谷歌宣布TensorFlow开源,这是一个在GPU上进行快速梯度式机器学习的巨大数……继续阅读 » 古月 5年前 (2021-04-26) 2585浏览 0评论670个赞
……继续阅读 » 古月 5年前 (2021-04-26) 3647浏览 0评论2959个赞
……继续阅读 » 古月 5年前 (2021-04-26) 2136浏览 0评论606个赞
……继续阅读 » 古月 5年前 (2021-04-26) 3201浏览 0评论718个赞
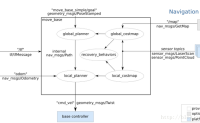
前边我们已经介绍了ROS的基本情况,以及新手入门ROS的初级教程,现在就要真正的使用ROS进入机器人世界了。接下来我们涉及到的……继续阅读 » 古月 5年前 (2021-04-26) 2178浏览 0评论1280个赞
……继续阅读 » 古月 5年前 (2021-04-26) 2558浏览 0评论2539个赞
……继续阅读 » 古月 5年前 (2021-04-26) 3311浏览 0评论2600个赞
……继续阅读 » 古月 5年前 (2021-04-26) 2787浏览 0评论1435个赞
……继续阅读 » 古月 5年前 (2021-04-26) 1990浏览 0评论246个赞
……继续阅读 » 古月 5年前 (2021-04-26) 2662浏览 0评论2869个赞
……继续阅读 » 古月 5年前 (2021-04-26) 2854浏览 0评论823个赞
……继续阅读 » 古月 5年前 (2021-04-26) 1929浏览 0评论2469个赞
……继续阅读 » 古月 5年前 (2021-04-26) 3491浏览 0评论1864个赞
……继续阅读 » 古月 5年前 (2021-04-26) 3675浏览 0评论2901个赞
……继续阅读 » 古月 5年前 (2021-04-26) 3579浏览 0评论2817个赞
……继续阅读 » 古月 5年前 (2021-04-26) 2460浏览 0评论2352个赞
……继续阅读 » 古月 5年前 (2021-04-26) 3630浏览 0评论1427个赞
……继续阅读 » 古月 5年前 (2021-04-26) 3081浏览 0评论2931个赞
……继续阅读 » 古月 5年前 (2021-04-26) 3246浏览 0评论1480个赞
……继续阅读 » 古月 5年前 (2021-04-26) 1765浏览 0评论1880个赞
……继续阅读 » 古月 5年前 (2021-04-26) 2130浏览 0评论390个赞








![[CPP] 智能指针](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://images.75271.com/wp-content/uploads/2021/03/5582acdbcdd06d7120649d012c33f4f3.jpg&h=123&w=200&q=90&zc=1&ct=1)