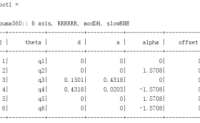
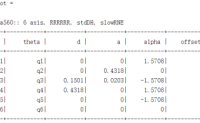
小伙伴们大家好!我来了^_^// 今天我们将继续上一次的话题,如何使用MATLAB来实现机器人的建模仿真与控制。在matlab要实现机器人的仿真与控制首先要知道机器人的DH参数,根据机器人的DH参数来推导机器人的正逆运动学,最后……继续阅读 » 二民院小学生 5年前 (2021-04-26) 3455浏览 0评论2861个赞
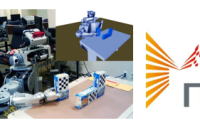
大家好,今天给大家继续分享一知半解|Matlab机器人建模与仿真控制这个系列的内容之三。 首先接着上一篇博客的内容,我们利用机器人的URDF文件,在Matlab环境下利用m代码和机器人系统工具箱,完成了puma560的可视化与运……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2850浏览 0评论1107个赞
嗨伙计们,还记得上次提到的三种webots机器人建模方式吗?我们先来简单回顾一下: ① 使用webots模型树建模,同时这也是我们环境建模的主要方式;&nb……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3075浏览 0评论375个赞
之前发了一个在gazebo中抓取失败的帖子,过段时间来看被删了好像, 可能我发错地方了。后来在github上一个牛人的程序里找到了一个grasp fix的插件来修复抓取问题(据他说,这个问题是gazebo7以及之前版本普遍的问题,ode的问题), 虽然我的毕设到此能抓就行了……继续阅读 » 雷子 5年前 (2021-04-26) 3633浏览 0评论2248个赞
大家好,最近有其他事情耽搁了更新。今天给大家继续一知半解的系列4。在上一篇博客中我们已经演示了如何利用Simulink中的Slider Gain模块和Siganl Build模块对机器人进行简单运动控制。今天简单的介绍机器人独立关节的位置PID控制,并演示一下如何使用GUI……继续阅读 » 二民院小学生 5年前 (2021-04-26) 1725浏览 0评论2615个赞
1、前记先提一下,在这篇MATLAB机器人可视化文章中提到了如何使CAD模型的……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2543浏览 0评论1762个赞
1、将 CAD 和 URDF 多体模型导入Simscape Multibody环境中。从第三方应用程序导入多体模型, 以便在Simscape多体环境中进行模拟、设计和分析任务。可以使用 ……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2968浏览 0评论1819个赞
前言:续写一知半解系列,在上一篇中相信对大家对GUI的控件操作和与Simulink数据传递比较熟悉了。这篇主要解决下上次留下的问题。主要包括 :(1)GUI界面其他控件说明。包括运行时间,工具箱机器人显示和末端位姿计算显示,利……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2769浏览 0评论1422个赞
说明 机械臂末端执行器的种类很多,目前针对目标抓取最常使用的末端执行器就是夹抓和真空吸盘式。但是在gazebo仿真中,需要对抓取目标……继续阅读 » 神秘老铁 5年前 (2021-04-26) 3788浏览 0评论113个赞
在学习ROS的过程中,有一步是永远也省不了的,那就是搭建ROS环境。回忆当年,起初我是用的虚拟机进行安装学习,但是会有各种各样驱动上的bug,网络配置也会有一些问题,感觉附加问题比较多。之后便改用双系统,然而第一次安装双系统的时候,也是遇到了一些问题,分盘、引导之类的也……继续阅读 » 谦墨 5年前 (2021-04-26) 3642浏览 0评论645个赞
之前关于机械臂的教程《ROS机械臂控制之跟踪二维码<……继续阅读 » 神秘老铁 5年前 (2021-04-26) 3459浏览 0评论527个赞
前言 这一节玩一玩ros中的fetch机器人,和它相似的是pr2机器人,pr2有两条胳膊。 fetch: ……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3727浏览 0评论1410个赞
TF坐标变换基础 机器人建模和控制必须掌握坐标系和坐标变换等基础知识。机器人在空间中运动主要有两种形式: 平移和旋转 也就是线速度和角速度……继续阅读 » zhangrelay 5年前 (2021-04-26) 1729浏览 0评论2640个赞
文章目录本文软件版本loadrobotimportrobotri……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 3202浏览 0评论1501个赞
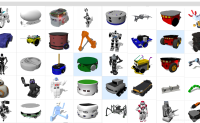
目前最主流的机器人操作系统为ROS1+ROS2,已成业界共识,如果没有购买机器人硬件又想学习机器人相关知识,那么一款仿真软件必不可少,软件分为免费和付费,下面将详细介绍。 每个人心中最好的机器人仿真软件标准不同,此文只做汇总不做评论,不……继续阅读 » zhangrelay 5年前 (2021-04-26) 1938浏览 0评论1986个赞
1 Webot介绍 Webots是一个开源的三维移动机器人模拟器,它与gazebo类似都是ros中仿真环境,但是对于gazebo而言,需要比较复杂的配置,尤其是涉及到使用GPU的时候,对我们这些初学者并不友好。webot在2018年以前是一款商业软件,商业软件的……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2518浏览 0评论987个赞
ros 与 matlab 通讯使用的是ros中的主从机策略。 1 准备条件 1、首先我们需要在matlab上安装 “Robotics_System_Toolbox” 工具箱,matlab2015B及以后自动安装有这个工具箱,但是可能由于激活的缘故,使得在输入r……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2835浏览 0评论2354个赞
Webot 与ROS通讯1 Webot Ubuntu客户端与ROS通讯1.1 配置webots_ros包……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3502浏览 0评论659个赞
新建环境模型1 新建世界模型2 添加机器人模型3 添加机器人控制器参考资料……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 1648浏览 0评论1384个赞
Simscape建模笔记 urdf开始讲起吧……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 2874浏览 0评论492个赞
这个工具的作用就是构造一个三维的路标,再根据一系列的pose将这些路标投影到一系列照片上,也就是视频。可以用来进行VO-SLAM的仿真,也很容易拓展为VIO-SLAM的仿真工具。github地址:……继续阅读 » iwande 5年前 (2021-04-26) 2235浏览 0评论2741个赞
新建机器人模型1 添加机器人本体1.1 添加Body1.2 添加机器人轮子 ……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2828浏览 0评论2468个赞
新建机器人控制器1 新建控制器2 控制器说明3 运行效果参考资料……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 1854浏览 0评论1807个赞
水下平台,如ROV,AUV等的机械结构通常会随着配件的变化而变化。比如,改变推进器的布局,添加重量比较大的传感器等。机械结构的变化反过来会影响运动控制。因此,在设计软件架构时,将机械参数在程序中写死是非常不合理的。根据机械模型设计配置文件,供程序加载是比较理想方案。 ……继续阅读 » cabinx 5年前 (2021-04-26) 2958浏览 0评论2833个赞
双臂Matlab仿真建模文章目录双臂Matlab仿真建模……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 3207浏览 0评论2266个赞
文章目录本文软件版本软件介绍代码功能介绍……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 3364浏览 0评论437个赞
推进器电机模型文件的内容只有一个:推进器推力与PWM波的映射关系。当我们推算得到某时刻该推进器需要提供的推力时,我们需要根据映射关系计算出出对应的PWM波下发给下层以实现控制。不同类型的推进器推力与PWM波的映射关系是不同的,这个有的产品可能会给出,没有的话可能需要自行测定。 &……继续阅读 » iwande 5年前 (2021-04-26) 2900浏览 0评论2068个赞
无人机仿真-PX4固件编译、3D仿真环境gazebo及offboard模式控制无人机运动 这篇博客讲的是如何使用仿真环境进行无人机的仿真和控制,如果还没搭建好仿真环境,可以参考我的上一篇……继续阅读 » 不断积淀 5年前 (2021-04-26) 1910浏览 0评论787个赞
文章目录教程描述准备工作 2.1 创建工作空间 2.2 创建ROS硬件描述包小车模型示意图创建urdf……继续阅读 » 懒小象 5年前 (2021-04-26) 3796浏览 0评论106个赞
之前对MoveIt的印象一直停留在使用Rviz拖动机械臂模型,然后再点击“plan”实现轨迹的规划,点击“execute”执行机械臂的运动这种比较浅层的功能。实际我们在控制机械臂运动的时候大都是通过编程的方式控制,而不是Rviz的图形化控制。 在MoveIt中有三个主要的控制接口……继续阅读 » 编程芝士 5年前 (2021-04-26) 3336浏览 0评论704个赞
ExampleHelperRobotSimulator类文章目录ExampleHelp……继续阅读 » 懒小象 5年前 (2021-04-26) 2798浏览 0评论257个赞
文章目录准备工作generalizedInverseKinematics……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 2093浏览 0评论1571个赞
与ROS通讯1 Camera 相机2 IMU 传感器3 GPS 传感器4 Lidar传感器……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3473浏览 0评论777个赞
与ROS通讯1 Webots仿真2 Gazebo仿真3 Stage仿真参考资料……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2009浏览 0评论2289个赞
一、MATLAB基本功能1、MATLAB帮助 (1)help函数 help可用于查看对应函数的帮助文本 ……继续阅读 » autotian 5年前 (2021-04-26) 2046浏览 0评论2052个赞
文章目录 bsplinepolytraj cubicpolytraj quinticpolytraj rottraj transformtraj trapveltraj 参考 ……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 2898浏览 0评论2132个赞
系统辨识专题(一)——MATLAB系统辨识工具箱的使用案例 在建立多旋翼无人机系统模型的基础上,我们能够更有针对性地设计对应的控制器,为无人机系统故障诊断提供判据。本文将结合系统Matlab自带的系统辨识工具箱阐述一个简单的过程模型的完整辨识过程。 在使用系统辨……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 3374浏览 0评论1961个赞
此文档作为自己学习过程中一个记录复习,基本来源于《Robotics, Vision & Control》这本书,可以作为matlab机器人工具箱的说明书来用,有兴趣可移步自行下载相关文档 ……继续阅读 » 小磊在路上 5年前 (2021-04-26) 3117浏览 0评论2111个赞
目录 1. 引言 2. 齐次变换矩阵的三种解读 2.1 坐标系表示  ……继续阅读 » hitgavin 5年前 (2021-04-26) 3160浏览 0评论410个赞
目录1. 引言2. 连杆坐标系3 DH参数3.1 DH参数的介绍……继续阅读 » hitgavin 5年前 (2021-04-26) 3421浏览 0评论1607个赞
声明:本文整理自网络,内容仅作博主学习笔记记录,版权归原作者所有! 官方参考文档: ……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3410浏览 0评论2224个赞
刚体加速度 分析刚体加速度时,在任一顺势瞬时,对刚体的线速度和角速度进行求导,可以分别得到线加速度和 角加速度……继续阅读 » 小磊在路上 5年前 (2021-04-26) 3032浏览 0评论1778个赞
目录1. 引言2. 轴角/旋转向量3. 罗德里格斯公式4. 轴角转旋转矩阵……继续阅读 » hitgavin 5年前 (2021-04-26) 2114浏览 0评论2784个赞
……继续阅读 » chuchu 5年前 (2021-04-26) 2682浏览 0评论900个赞
……继续阅读 » 今夜有雨 5年前 (2021-04-26) 3297浏览 0评论1672个赞