robot_localization是基于卡尔曼滤波在ROS系统上比较成熟、应用比较广泛的一个机器人动态定位软件包。robot_localization软件包中使用的定位算法并不是最时新最优秀的,但是它具备几个不可替代的优势:<……继续阅读 » 天马微云 5年前 (2021-04-26) 2494浏览 0评论1607个赞
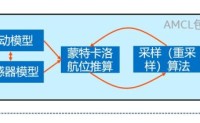
AMCL是ROS/ROS2系统中最官方的定位模块,是导航模块中唯一指定的定位算法。在ROS/ROS2系统中,乃至整个移动机器人领域都是举足轻重的重要地位。虽然陆续也有许多其它的定位算法出现,但是在ROS/ROS2系统中,目前也仅仅……继续阅读 » 天马微云 5年前 (2021-04-26) 2979浏览 0评论1247个赞
本章进入最为激动的机器人自主导航的学习,将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: 在机器人上使用传感器google-cartog……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3319浏览 0评论1998个赞
通过前面的基础学习,本章进入最为激动的机器人自主导航的学习。在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命。本章将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: 在机器人上使……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 1898浏览 0评论1594个赞
通过前面的基础学习,本章进入最为激动的机器人自主导航的学习。在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命。本章将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: 在机器人上使……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2254浏览 0评论735个赞
通过前面的基础学习,本章进入最为激动的机器人自主导航的学习。在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命。本章将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: 在机器人上使……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 1678浏览 0评论2870个赞
不同于之前发布的文章。我将使用一种全新的方式,iPad Notability+Blog的方式打开这个板块的大门。原因有两个: (1)Notability更方便手写长公式,也方便手绘坐标系变换等等; ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 1560浏览 0评论1957个赞
效果 ……继续阅读 » 很不专业 5年前 (2021-04-26) 2179浏览 0评论254个赞
摘要 这一章将进入机器人语音交互的学习,让机器人能跟人进行语音对话交流。这是一件很酷的事情,本章将涉及到语音识别、语音合成、自然语言处理方面的知识。本章内容: ……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 1793浏览 0评论672个赞
0.安装步骤预览 (1)系统默认自带python2.x,所以需要先安装python3.x (2)python2对应pip,python3对应pip3,用源码安装python3后pip3也自动安装了 (3)用pip3安装virtualenv (4)用virtual……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3425浏览 0评论302个赞
android要与ROS通讯,一种是基于rosbridge,另一种是基于rosjava库。 相关参考例子工程 ……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3401浏览 0评论850个赞
扩展卡尔曼滤波定位是马尔可夫定位中的一种特殊情况,在EKF定位算法中,我们假设地图是由一系列特征组成的,并且每个特征都是独特的。在t时刻的任何一个点,机器人可以通过传感器获得由与附近特征的距离、方向组成的向量: Z_t =……继续阅读 » Z 5年前 (2021-04-26) 1901浏览 0评论1018个赞
这两天入校手续马上办完了,就要进组搬砖了。组里除了做3D激光SLAM,视觉IMU融合的学长,还有做传感器的和水下SLAM的。就着对各个方向多些了解进而发散思维的想法,从而去了解了水下SLAM。 ……继续阅读 » 郑纯然 5年前 (2021-04-26) 3579浏览 0评论2890个赞
您真的懂了移动机器人是怎么构建地图的吗?……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 3619浏览 0评论2469个赞
占据栅格地图构建(Occupancy Grid Map) 上一篇文章介绍了,移动机器人地图构建问题,主要以gmapping为例,讲解了地图构建的整个流程。看过前面文章的小伙伴肯定都知道,gmapping算……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2613浏览 0评论1131个赞
这篇文章针对有一定SLAM基础的同学或者对李群李代数的应用感兴趣的数学专业同学,已经很小众了,但对于真正干这行并想要更深理解的同学可能会很有帮助,因此花了些时间整理发出来。要从理论推导到后面代码应用都读懂难度还是比较大,尽量讲解。 李群李代数其……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2921浏览 0评论2213个赞
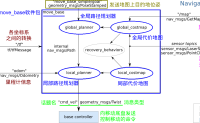
摘要 ROS 导航堆栈对于移动机器人从一个地方移动到另一个地方是强大的可靠。导航堆栈的工作是通过处理来自测距、传感器和环境图的数据来产生让机器人执行的安全路径。最大限度地提高此导航堆栈的性能需要对参数进行一些精细的调整,这项工作并不像看起来那么简单。如果对概念和……继续阅读 » 郑纯然 5年前 (2021-04-26) 2522浏览 0评论232个赞
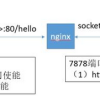
ROS多用户并发demo前言程序测试结果结论……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 3025浏览 0评论2737个赞
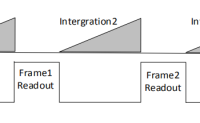
开始本文之前,先介绍几个基本概念。 1. 相机特性-曝光和读出 相机获取一帧图像分为曝光和读出两个阶段。相机使用的传感器不同,相机的曝光时间和读出时间的重叠关系也有所不同,分为交叠曝光和非交叠曝光两种。交叠曝光和非交叠曝光相……继续阅读 » 郑纯然 5年前 (2021-04-26) 2846浏览 0评论2326个赞
第二次翻看《视觉SLAM十四讲》,发现第一次看过的都忘记了,认真分析了一下,我认为是第一次学习没有弄清楚整体的脉络。因此这次做一个小小的总结,希望不要再过几天又忘掉。前面的内容就没有总结的意义了,因为是最简单的,真正进入SLAM,应该是从这章的内容开始。 ……继续阅读 » 微鉴道长 5年前 (2021-04-26) 2394浏览 0评论1244个赞
准备工作……继续阅读 » 小黑鸭 5年前 (2021-04-26) 3323浏览 0评论1166个赞
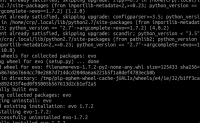
EVO使用教程1 EVO环境安装1.1 二进制安装1.2 源码安装……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3423浏览 0评论2752个赞
本章的理论内容已经总结到了SLAM14讲学习笔记(九)单目稠密重建、深度滤波器详解与补充(纠正第13讲 建图 中的错误),这章的内容在关键的深度滤波器的地……继续阅读 » 微鉴道长 5年前 (2021-04-26) 2566浏览 0评论428个赞
这讲会提供示例代码! Content 1. “迷宫寻宝”……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2043浏览 0评论2146个赞
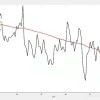
本节目标:搭建一套400行代码的激光里程计。需要plane特征进行点面距离估计达到位姿优化效果,使用ceres优化,把地图和轨迹打在公屏上。这次目标就是水水地跑通一个最基础的lidar odometer。……继续阅读 » Eminbogen 5年前 (2021-04-26) 2922浏览 0评论1995个赞
本节目标:搭建一套700行代码的激光SLAM。通过对ALOAM进行修改实验,确定对激光SLAM最核心的技巧,并接上节里程计,完成后端,构建较大场景(轨迹约2km)地图。 预期效果: ……继续阅读 » Eminbogen 5年前 (2021-04-26) 2321浏览 0评论2718个赞
第一步:TX2安装ROS kinetic http://www.ncnynl.com/archives/201706/1750.html 第二步:安装激光雷达驱动(测试过rplidar、F4)……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2568浏览 0评论438个赞
环境: (1)虚拟机本地端IP 192.168.10.30 (虚拟机需要通过桥接的形式与PC本地机连接, PC 机IP 192.168.10.21) (2)移动端 IP 192.168.10.11 1 配置本地环境变量 (1)打开 .bashrc <……继续阅读 » bbtang5568 5年前 (2021-04-26) 3094浏览 0评论1523个赞
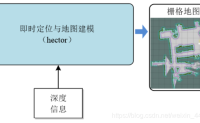
hector_slam功能包使用高斯牛顿方法,不需要里程计数据,只根据激光信息便可构建地图。 所以他的总体框架如下: ……继续阅读 » 十啵 5年前 (2021-04-26) 3427浏览 0评论1233个赞
2016年10月5日,谷歌宣布开放一个名为cartographer的即时定位与地图建模库,开发人员可以使用该库实现机器人在二维或三维条件下的定位及建图功能。cartograhper的设计目的是在计算资源有限的情况下,实时获取相对较高精度的2D地图。考虑到基于模拟策略的粒子滤波方法……继续阅读 » 十啵 5年前 (2021-04-26) 2118浏览 0评论1389个赞
0x00 什么是costmap代价地图 在机器人进行路径规划时,我们需要明白规划算法是依靠什么在地图上来计算出来一条路径的。依靠的是gmapping扫描构建的一张环境全局地图,但是仅仅依靠一张原始的全局地图是不行的。因为这张地图是静……继续阅读 » ROS小课堂 5年前 (2021-04-26) 1604浏览 0评论2277个赞
0x00 为何需要路径规划? 现在我们已经可以构建当前环境地图,可以实现机器人在当前地图中的定位。那接下来就可以在地图上给定目标点,开始规划路径控制机器人移动过去,这样就可以完成在已知地图中进行自动导航的任务了。在已知地图中进行路径规划可以举一个很形象的例子,大家在……继续阅读 » ROS小课堂 5年前 (2021-04-26) 3247浏览 0评论1067个赞
之前为了提升svo的鲁棒性,进行了一些不同的尝试,虽然稳定性有所提升,两个视频demo在下面,但依然不尽人意。 效果1 (svo基础上添加了edgelet feature) &n……继续阅读 » 白巧克力亦唯心 5年前 (2021-04-26) 2132浏览 0评论1204个赞
LOAM-Livox是针对livox-LiDAR的一个激光里程计和建图(LOAM)的功能包 Loam-Livox是一个适用于 Livox LiDAR 强大的、低漂移实时的里程计和建图功能包 Livox LiDAR……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 3272浏览 0评论2037个赞
前言 一个二维的 marker 通常有四个角点,如果把四个角点当做独立的三维特征点去参与BA优化,那么需要十二个参数,并且四个角点之间的约束(边长以及正交)还不好加入优化。这篇博客是将一个marker用6自由度的坐标系进行建模,推导了整个Marke……继续阅读 » 白巧克力亦唯心 5年前 (2021-04-26) 2770浏览 0评论1653个赞
在自动驾驶领域,激光里程计和建图(LOAM)已经起到重要的作用,归因于它可以在定位机器人的位姿的同时建立周围环境的高精度、高分辨率的地图。 ……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 2821浏览 0评论2378个赞
在上一篇中对 LOAM-Livox 算法做了整体的总结。 最后给出了 算法的整体框图 如下: ……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 3337浏览 0评论2214个赞
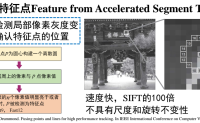
@[toc]一、ORB特征<……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2709浏览 0评论1968个赞
……继续阅读 » yuanguobin01 5年前 (2021-04-26) 3937浏览 0评论444个赞
1.序言倒腾一段时间的LIO-SAM,实在是累,是那种没任何收获的感觉。吐槽几点……继续阅读 » yuanguobin01 5年前 (2021-04-26) 3589浏览 0评论2400个赞
0x00 gmapping简介gmapping是一种高效的Rao-Blackwellized粒子滤波器,用于根据激光雷达测距数据来生成2D珊格地图。gmapping是OpenSLAM下……继续阅读 » ROS小课堂 5年前 (2021-04-26) 2795浏览 0评论331个赞
这篇博客主要是一些调试中踩的坑及验证过的东西,以供大家参考。1.GTSAM使用篇……继续阅读 » yuanguobin01 5年前 (2021-04-26) 1956浏览 0评论501个赞
@[toc]一、词袋模型的引出<……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2340浏览 0评论2984个赞
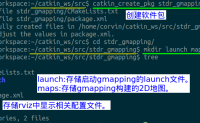
本人为了对比研究三大经典SLAM算法(Gmapping、Cartographer、Hector)的优缺因此考虑在Turtlebot3仿真环境下对这三个SLAM算法进行测试。没想到测试第一个算法(Google的cartographer)就花……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 3161浏览 0评论1392个赞
一、前言该篇为本文的重点,主要内容为cartographer_turtlrbot3源码库的安装二、cartographer_turtlebot源码库安装这里基本参考创客智造的安装教程,但是由于教……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 1705浏览 0评论2660个赞













![一起做激光SLAM[三]位姿估计,ceres优化,地图构图](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200801112537664.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3VubGltaXRlZGFp,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)
![一起做激光SLAM[四]常见SLAM技巧使用效果对比,后端](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=http://images.75271.com/Public/Uploads/2021-04-26/微信图片_20210125155059.png&h=123&w=200&q=90&zc=1&ct=1)