磨蹭了好久终于开始写本行SLAM系列了。鄙人目前水平一般,但接下来的几年也都会在这个方向继续深入下去,所以打算尽我所能地写一个完整的SLAM从入门到精(fang)通(qi)的系列。文章的内容大概会分为三个大部分:&nb……继续阅读 » 5年前 (2021-04-26) 2074浏览 0评论809个赞
关于2维的SLAM我们主要讲解两个算法,基本都源于。第一是基于滤波的扩展卡尔曼滤波SLAM,第二是基于图优化SLAM。前者现在基本上已经没有实际使用了,实际的应用3d的SLAM也基本是基于后者的。但扩展卡尔曼滤波S……继续阅读 » 5年前 (2021-04-26) 3214浏览 0评论1414个赞
背景和初衷 小弟是University of Colorado at Boulder的一个在读学生.在ARPG(Autonomous Robotics and Perception Group)实验室学习. 自己当初入门ROS的时候……继续阅读 » 5年前 (2021-04-26) 1817浏览 0评论1286个赞
又过了好久了…Em…上一讲我们不甚详细地提及了EKF扩展卡尔曼滤波,这一讲我们就来说扩展卡尔曼滤波在SLAM里的应用。需要再次提及的是EKF-SLAM是比较早期的应用,但是因为简单好懂,所以用来帮助我们来熟悉一下SLAM的过程。 一旦要使用扩展卡尔曼滤波,我……继续阅读 » 5年前 (2021-04-26) 2939浏览 0评论1896个赞
发布接收int类型消息 第一篇文章我们发布接收了string类型的消息.我们提到在ROS里发布的消息必须是在ROS中定义了的.就是如果你要发布一个string类型的消息,你不能直接发布一个std::string,你得发布一个std_msgs::S……继续阅读 » 5年前 (2021-04-26) 3579浏览 0评论1857个赞
上一讲我们讲了如何发布接收int,float和array类型的消息,这些也都算是c++自有的消息,被归纳在ROS中的std_msgs这个命名空间下(命名空间skr啥?).这讲我们来看看如何发布接收ROS自己独特的message类型:PoseStam……继续阅读 » 5年前 (2021-04-26) 2969浏览 0评论2423个赞
本文作者:陈瓜瓜 由于下一讲要讲到怎么在类中pub和sub消息.那么考虑到有些同学对类不甚熟悉.我们稍微回顾一下.但关于类网上一查其实一大堆东西,而且都是从入门讲起.所以我这儿肯定不会重复书写那些内容.要介绍的几个东西,其实本来要用得好的话蛮复杂,我们只会涉及到皮毛……继续阅读 » 5年前 (2021-04-26) 1637浏览 0评论1199个赞
本文作者:陈瓜瓜 许久没更新了,放假回家没想到还要被老师催论文,连玩耍的时间都不够= =.好了,闲话少说 例1 上一讲讲了一些类什么的基础.这一讲我们就谈谈怎么在类中发布和接收消息了.当你遇到稍微大型一点的……继续阅读 » 5年前 (2021-04-26) 2300浏览 0评论609个赞
之前我们一直在用rosrun跑程序,格式如下 rosrun package_name executable_file_name &nbs……继续阅读 » 5年前 (2021-04-26) 2748浏览 0评论2373个赞
欢迎来到第七讲,我居然能写这么多,撒花!! rosbag是用来储存ros消息的东西。 在我们平时处理一些robotics问题的时候,我们得到一些数据,有些时候我们需要实时的处理,即获得数据,写好的程序分析数据然后得出结果,但另一些时候 ……继续阅读 » 5年前 (2021-04-26) 2619浏览 0评论2096个赞
欢迎来到第8讲,预计还有两讲结束ROS相关的话题。 Rviz作为ROS的可视化工具拥有非常强大的功能,我也不是全部都用过,略懂皮毛。可视化是我们分析问题,向他人展现成果时最重要的工具。打个比方,我们在第三讲能够发布poseS……继续阅读 » 5年前 (2021-04-26) 3759浏览 0评论2432个赞
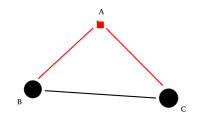
在机器人领域里,多个坐标系统应该是最常见的事之一了。 一个机械臂,每一个关节都需要一个坐标系,一个无人小车不同的传感器一般都需要自己的坐标系。必不可少的,他们都需要世界坐标系。 有些坐标系是移动的,比如在一……继续阅读 » 5年前 (2021-04-26) 2090浏览 0评论1674个赞
欢迎来到最后一讲。关于自定义消息类型网上已经有一些文章了,写地也明了,不过这这里会补充的几点就是你自定义了一个新的消息类型之后在不同的package和不同的workspace中如何使用,当然我们仍然从基本的讲起。 定制基本消息……继续阅读 » 5年前 (2021-04-26) 2764浏览 0评论409个赞
理解坐标系之间的转换关系很重要。对于刚体变换矩阵,搞机器人的朋友肯定不陌生,它一般如下表示 ……继续阅读 » 5年前 (2021-04-26) 2940浏览 0评论2650个赞
这篇文章针对有一定SLAM基础的同学或者对李群李代数的应用感兴趣的数学专业同学,已经很小众了,但对于真正干这行并想要更深理解的同学可能会很有帮助,因此花了些时间整理发出来。要从理论推导到后面代码应用都读懂难度还是比较大,尽量讲解。 李群李代数其……继续阅读 » 5年前 (2021-04-26) 2316浏览 0评论2704个赞
这篇文章针对同一个任务进行了单线程,多线程和CUDA程序的比较。以显示GPU在并行计算上的时间节省能力。 对GPU编程不了解的同学,这篇文章可能不会有特别大的帮助,因为我不打算对CUDA编程有很详细的讲解,我浏览了一下网上,无论所英文还是中文都有了很详细的入门讲……继续阅读 » 5年前 (2021-04-26) 2875浏览 0评论2940个赞
一些背景知识 TSDF的主要作用是进行三维场景在计算机中的重建。目前的那些中文博客与成熟的TSDF应用其实还有差距,故写此文。 视觉SLAM应用的一个分支为Dense SLAM。简单来说就是在定位机器人的同时对周围的环境进行(近……继续阅读 » 5年前 (2021-04-26) 3207浏览 0评论2304个赞
在tsdf的第一讲里我们讲解了最基本的TSDF重构算法。也提出了算法的一些不足之处。 ……继续阅读 » 5年前 (2021-04-26) 3387浏览 0评论210个赞
voxblox结构图 上一讲我们说……继续阅读 » 5年前 (2021-04-26) 3441浏览 0评论1581个赞