什么是SDF? SDF是一种XML格式,能够描述机器人、静态和动态物体、照明、地形甚至物理学的各方面的信息。SDF……继续阅读 » 小明工坊 5年前 (2021-04-26) 3696浏览 0评论1080个赞
……继续阅读 » 小明工坊 5年前 (2021-04-26) 3241浏览 0评论1006个赞
……继续阅读 » 小明工坊 5年前 (2021-04-26) 3766浏览 0评论1361个赞
前言……继续阅读 » 小明工坊 5年前 (2021-04-26) 2855浏览 0评论2649个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时)……继续阅读 » 小明工坊 5年前 (2021-04-26) 2694浏览 0评论1772个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时),使用SDF格式会更加合理。鉴于中文网络上几乎没有成体系的SDF介绍博文,因……继续阅读 » 小明工坊 5年前 (2021-04-26) 2653浏览 0评论1873个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时),使用SDF格式会更加合理。鉴于中文网络上几乎没有成体系的SDF介绍博文,因……继续阅读 » 小明工坊 5年前 (2021-04-26) 2805浏览 0评论1149个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时),使用SDF格式会更加合理。鉴于中文网络上几乎没有成体系的SDF介绍博文,因……继续阅读 » 小明工坊 5年前 (2021-04-26) 3139浏览 0评论735个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时)……继续阅读 » 小明工坊 5年前 (2021-04-26) 3604浏览 0评论404个赞
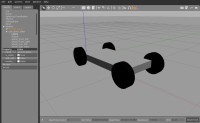
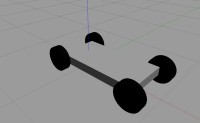
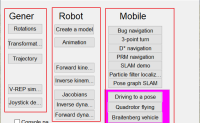
嗨伙计们,月更侠罗伯特祥又来和大家见面了!今天我们来聊一聊Webots中关于机器人建模的那点事儿,相信有了前面的基础,今天的文章对你来说So easy!话不多说,我们来看看怎么玩儿吧~1.四轮差速小车建模环境建模我们就略过去了,直接上……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3213浏览 0评论1463个赞
1. GPSfrom controller import Robotfrom……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 1899浏览 0评论1112个赞
又和大家见面了!今天跟大家聊聊Webots是如何跟ROS联合仿真的,话不多说,直接进入正题~ 1.开餐前的准备 关于仿真环境和机器人……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3870浏览 0评论2702个赞
嗨,又和大家见面了!上次我们在《Webots建模指南3 -ROS控制篇(上)》这篇文章中梳理了Webots与ROS的通信过程,今天我就来带大家一起实操一下,看看Webots怎样实现ROS联合……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 2497浏览 0评论2568个赞
前言 上一篇博客:ros机器人编程实践(16.1)- 仿真SmartCar之搭建模型 上一章已经成功搭建SmartCar模型,这一章在基础上做一些优化,并让他跑起来<……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 1673浏览 0评论2077个赞
Hello,欢迎做客我的博客! 在动力学仿真中,我们不得不采用迭代的方法进行数值计算,这个时候我们会用到离散化的数学模型。 可是,我们在建立模型时,考虑的都是连续的情况……继续阅读 » 西涯先生 5年前 (2021-04-26) 2319浏览 0评论2162个赞
惯性张量是什么? 惯性张量是用于描述刚体转动惯性的一个量,并且它是一个矩阵。它通常表示为: ……继续阅读 » 西涯先生 5年前 (2021-04-26) 2787浏览 0评论2433个赞
嗨伙计们,我又来啦~ 上次说以后要写点儿控制的东西,思前想后纠结了好久到底要写个啥,最终决定还是先从参数辨识开始,至于结合控制理论的小demo,容我梳理一下思路再来搞吧! ……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3658浏览 0评论2163个赞
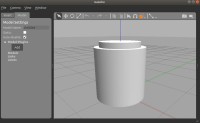
新建环境模型1 控制器结构2 操作函数2.1 初始化函数2.2 距离传感器操作函数2.3 ground_sensors 操……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2101浏览 0评论2459个赞
1. SDF建模简介 在使用Gazebo仿真的时候,需要先对环境和机器人进行建模,而Gazebo仿真建模的标准格式就是SDF(sdfor……继续阅读 » gezp 5年前 (2021-04-26) 2826浏览 0评论2221个赞
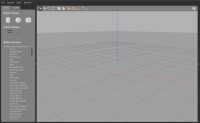
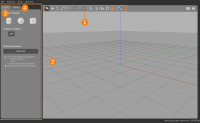
创建模型 本节目标一、模型编辑器用户界面调色板(左面板)工具……继续阅读 » 我是。 5年前 (2021-04-26) 2415浏览 0评论1606个赞
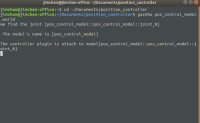
###### gazebo配合rviz 仿真机械臂 ####### 一旦机器人有超过6个关节,逆向运动学函数不唯一,可能存在多个解,逆向运动学很难,需要ROS中的逆向运动学包的使用,简化成矩阵的运算对于机械臂而言,需要的是能操作follow_joi……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 1750浏览 0评论866个赞
1.什么是URDF? URDF全称(United Robotics Description Format)统一机器人描述格式,是一个XML语法框架下用来描述机器人的语言格式,URDF在ROS界很流行。我们可以 ……继续阅读 » chuchu 5年前 (2021-04-26) 2579浏览 0评论2938个赞
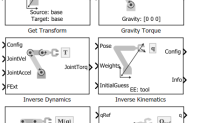
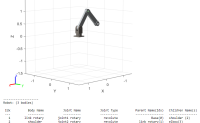
本文的讨论对象仅局限于刚体模型 Matlab建立机器人模型主要有两个方面(当然不排除有其他的,我只说我知道的): Rigidbody tree 坐标系模型Simsacpe 物理模型 ……继续阅读 » chuchu 5年前 (2021-04-26) 2195浏览 0评论2935个赞
文章目录 0.前言1.URDF 转化成 rigidbody tree格式2.URD……继续阅读 » chuchu 5年前 (2021-04-26) 2738浏览 0评论1978个赞
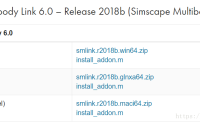
Matlab – Solidworks 机器人建模(4)—— 如何把SolidWorks模型导入到Matlab (Simscape模型) 1.说在前面 本文会介绍怎么直接把solidworks的模型转换成Matla……继续阅读 » chuchu 5年前 (2021-04-26) 3739浏览 0评论2943个赞
Matlab – Solidworks 机器人建模(5)—— 给模型添加摩擦力 0. 前言 建好模型并成功进行一次仿真之后,我们发现虽然模型可以像模像样的产生由重力带来的运动,但是也发现零件可以穿过其他零件,也叫“……继续阅读 » chuchu 5年前 (2021-04-26) 3136浏览 0评论2693个赞
前言 本文适用对象: 没有机器人的Solidworks模型自己又懒得画的童鞋没有机器人URDF模型的童鞋 如果你在Matlab帮助里面搜索rigid……继续阅读 » chuchu 5年前 (2021-04-26) 3415浏览 0评论870个赞
借助ROS的工具箱让turtlebot在gazebo中运行起来. Part 1.1: 让turtlebot跑起来  ……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 1922浏览 0评论2088个赞
继上篇文章ROS: URDF自定义robot model —–解决WARN:No tf data. Actual error: Fixed Frame [base_link] does no……继续阅读 » bbtang5568 5年前 (2021-04-26) 3216浏览 0评论2072个赞
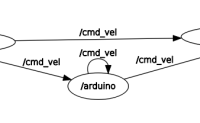
ros_arduino_brige功能包使用和安装这里就不多说了,详情点击 先看一下ros_arduino_b……继续阅读 » 十啵 5年前 (2021-04-26) 3231浏览 0评论898个赞
题目翻译 概要……继续阅读 » better_coder 5年前 (2021-04-26) 2334浏览 0评论2373个赞
目前为止, 我们都旨在构建一个能够自主运行的机器人,这个就研究方向更加合理的名词应该叫自主移动机器人. 推荐一本个人觉得很不错的书 Ro……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 1880浏览 0评论2889个赞
对于机器人的视觉这些信息,很容易在ROS中呈现,但是对于ROS中力和力矩信息的展示,通常在实验室的时候使用真实的机器人和传感器,这个问题不需要考虑,直接读取真实的力和力矩传感器,然后通过ROS消息发布即可。可当疫情导致的有学不能上,有实验室不能去的时候,想在ROS中检验机器人力控……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2176浏览 0评论277个赞
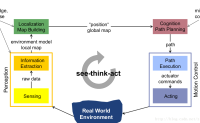
0x00 为何需要对机器人进行定位? 要想实现移动式机器人的自动导航需要完成以下六点,当然这些信息是我自己总结的仅供大家参考: (1)一张完整的高精度全局地图,机器人需要在该地图下完成自动导航,这是进行自动导航的必要且重要的前提; (2)机器人在地图的……继续阅读 » ROS小课堂 5年前 (2021-04-26) 1998浏览 0评论2558个赞
前言: 之前在Unity3D中尝试训练四足机器人学习奔跑前进,只是做了简单的尝试。在19年的寒假里由于要写论文,所以基于强化学习提出一种分层学习算法,实现四足机器人在腿瘸后仍可以继续向前运动。这种是一种比较简单的,所以也就只发表在国内的核心期刊上面。这也是我第……继续阅读 » JameScottX 5年前 (2021-04-26) 3234浏览 0评论2406个赞
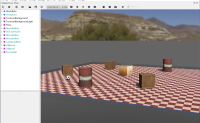
0x00 概述在前面的教程中,一直都是使用默认提供的一个地图。是不是stdr只能使用这个地图呢?那你就太小看stdr了,它加载地图的方式其实跟我们在amcl中要进行定位时的地图是一样的,都是需要类……继续阅读 » ROS小课堂 5年前 (2021-04-26) 3233浏览 0评论2737个赞
hector_quadrotor编译总结 | ubuntu 14.04 ros-indigo版本基于Ubuntu 14.04 LTS系统所用ROS版本为 Indi……继续阅读 » windSeS 5年前 (2021-04-26) 2906浏览 0评论642个赞
在机械工程中,Denavit-Hartenberg 参数(也称为 DH 参数)是与一个特定约定相关联的四个参数,用于将参考坐标系附加到空间运动链或机器人操作臂的连杆上。“Jacques Denavit and Richard Hartenberg ……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2468浏览 0评论2291个赞
【Matlab Robotics Toolbox】robotics toolbox学习及使用记录,方便自己后面复习、改进。基于Matlab R2019b 9.5; Peter Corke的Robotics Toolbox 10.3.1……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2513浏览 0评论2331个赞
hector_quadrotor编译总结 | ubuntu 16.04 ros-kinetic版本基于Ubuntu 16.04 LTS系统所用ROS版本为 Kin……继续阅读 » windSeS 5年前 (2021-04-26) 2206浏览 0评论1966个赞
之前写的文章分析了全向小车运动原理和基本构型,今天尝试把它部署到 Ros 上。……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 1974浏览 0评论1832个赞
准备工作安装桌面完整版ROSsu……继续阅读 » 初霁 5年前 (2021-04-26) 2095浏览 0评论627个赞
local costmap empty using move_base_node|turtlebot_stage在我运行roslaunch turtlebot_stage turtlebot_in_stage.la……继续阅读 » windSeS 5年前 (2021-04-26) 3088浏览 0评论459个赞
描述ROS系统下,使用moveit和gazebo搭建UR机械臂控制的仿真环境,并使用C++编写一个节点来控制UR机械臂的移动ROS系统:kineticUR5机械臂电脑系统:Ubuntu16.04截……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 2172浏览 0评论2594个赞
文章目录A 路径规划定义B 构型/位型空间(configuration Space)C 障碍物与构型空间C 环境模型建立D 欧氏距离与曼哈顿……继续阅读 » 二进制人工智能 5年前 (2021-04-26) 1992浏览 0评论907个赞