各位ROS与机器人技术爱好者们,大家好!我是小明,很荣幸受古月君的邀请,成为古月居的签约作者,相信以后我们会经常见面的。 ……继续阅读 » 5年前 (2021-04-26) 3124浏览 0评论2993个赞
大家好,我是小明,很高兴我们又见面了!今天谈的领域并非我的专业方向,但也同样有趣,初次接触时让我备受启发,因此分享给大家。和上次一样,本文的工程也为大家提供了源代码,方便交流学……继续阅读 » 5年前 (2021-04-26) 1971浏览 0评论454个赞
大家好,我是(月更侠)小明,很高兴我们又见面啦。相信大家从我之前的文章中能看出来,我所讲的内容基本都面向ROS新人,因为大家刚入门时,往往很难一窥程序的深层运行逻辑,使得许多问题迟迟无法解决,甚是耽误时间。例如在和小伙伴们……继续阅读 » 5年前 (2021-04-26) 3693浏览 0评论2349个赞
坦白说,这个OMPL系列实际上就是翻译……继续阅读 » 5年前 (2021-04-26) 2319浏览 0评论2289个赞
坦白说,这个OMPL系列实际上就是翻译……继续阅读 » 5年前 (2021-04-26) 2510浏览 0评论2451个赞
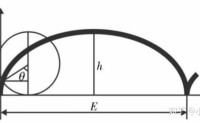
最近在重新琢磨Gazebo仿真环境,尚处于囫囵吞枣阶段。因为正好在看30多年前波士顿动力(BostonDynamics)创始人Marc Raibert的书《Legged Robots That Balance》,就用Gazebo搭建了一个简单的四足仿真模型练手。……继续阅读 » 5年前 (2021-04-26) 1749浏览 0评论805个赞
这几天继续琢磨Gazebo仿真环境。 在……继续阅读 » 5年前 (2021-04-26) 3032浏览 0评论128个赞
1 回顾上一篇文章中,我们介绍了如何使用OMPL进行单刚体运动规划。其中包含以下步骤:· ……继续阅读 » 5年前 (2021-04-26) 2597浏览 0评论1390个赞
1 回顾与引出——什么是最短路径? 在……继续阅读 » 5年前 (2021-04-26) 2410浏览 0评论996个赞
继续更新,这两天继续死磕Gazebo仿真。还是拿本人之前的公布的开源项目pigot四足机器人作为仿真对象,研究四足机器人的姿态控制算法仿真。将建模与仿真过程的经验教训和相关资料进行总结(如有兴趣,推荐看一看文末的参考资料) 这一……继续阅读 » 5年前 (2021-04-26) 2115浏览 0评论2261个赞
最近在琢磨别的事情,Gazebo探索上面进展不大,但也有一些收获,秉承慢慢写的佛系态度记录一下:1、pigot四足项目的步态改进,前行换成了摆线步态,加入了斜向步态2、Gazebo-IMU(惯性测量单元)插件的用法3、利……继续阅读 » 5年前 (2021-04-26) 2083浏览 0评论1943个赞
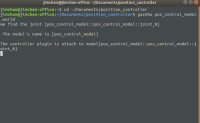
什么是SDF? SDF是一种XML格式,能够描述机器人、静态和动态物体、照明、地形甚至物理学的各方面的信息。SDF……继续阅读 » 5年前 (2021-04-26) 2962浏览 0评论2267个赞
……继续阅读 » 5年前 (2021-04-26) 3328浏览 0评论2047个赞
……继续阅读 » 5年前 (2021-04-26) 2462浏览 0评论2892个赞
前言……继续阅读 » 5年前 (2021-04-26) 3468浏览 0评论932个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时)……继续阅读 » 5年前 (2021-04-26) 3893浏览 0评论2687个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时),使用SDF格式会更加合理。鉴于中文网络上几乎没有成体系的SDF介绍博文,因……继续阅读 » 5年前 (2021-04-26) 2122浏览 0评论2043个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时),使用SDF格式会更加合理。鉴于中文网络上几乎没有成体系的SDF介绍博文,因……继续阅读 » 5年前 (2021-04-26) 2175浏览 0评论898个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时),使用SDF格式会更加合理。鉴于中文网络上几乎没有成体系的SDF介绍博文,因……继续阅读 » 5年前 (2021-04-26) 3894浏览 0评论1267个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时)……继续阅读 » 5年前 (2021-04-26) 3400浏览 0评论901个赞
本文参考Moveit官方教程,原文链接见文末。已经过本人踩坑验证:系统版本:ubuntu16.04ROS版本:Kinetic ……继续阅读 » 5年前 (2021-04-26) 3374浏览 0评论1026个赞
前言 如果是第一次使用Moveit!,建议先按照 ……继续阅读 » 5年前 (2021-04-26) 2188浏览 0评论610个赞
本文参考Moveit!官方文档。 系统:ubuntu 18.04 / 16.04 ROS:Melodic / Kinetic概述基于python的运动组API是最简单的……继续阅读 » 5年前 (2021-04-26) 3362浏览 0评论2723个赞