引言本教程连载一辆能够用 ROS 控制的带摄像头的小车,用 ROS 发布图像数据,对获取到的图像进行处理,如目标检测。本篇文章主要介绍如何把本教程后面的内容汇聚起来,实现一个能目标检测的小车。 ……继续阅读 » RT-Thread 5年前 (2021-04-26) 2643浏览 0评论2955个赞
前言这篇文档非常长所以我们会分成5篇来连载,因为机器学习并不是纯软件开发,简单地调用库函数 API,需要有一定的理论支撑,如果完全不介绍理论部分,可能就不知道为什么模型要这样设计,模型出了问……继续阅读 » RT-Thread 5年前 (2021-04-26) 2666浏览 0评论2999个赞
上期回顾:……继续阅读 » RT-Thread 5年前 (2021-04-26) 2736浏览 0评论1110个赞
上期回顾: RT-Thread智能车目标识别系统连载教程——手写体……继续阅读 » RT-Thread 5年前 (2021-04-26) 3440浏览 0评论2331个赞
想玩全向小车么?想搭建一个移动底盘么?想满足中二病的创造欲么? 想? 那么为什么不自己做一个麦克纳……继续阅读 » tloinny 5年前 (2021-04-26) 3366浏览 0评论2753个赞
上期回顾:RT-Thread智能车目标识别系统连载教程—……继续阅读 » RT-Thread 5年前 (2021-04-26) 1855浏览 0评论801个赞
上期回顾:RT-Thread智能车目标识别系统连载教程——手写体识别模型 (1)……继续阅读 » RT-Thread 5年前 (2021-04-26) 2600浏览 0评论2155个赞
上期回顾:RT-Thread智能车目标识别系统连载教程——手写体识别模型 (1)……继续阅读 » RT-Thread 5年前 (2021-04-26) 2925浏览 0评论1084个赞
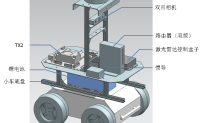
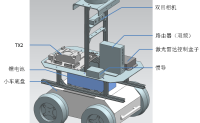
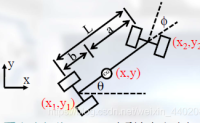
1、试验车的结构设计 试验车三维结构示意图如图1所示。试验车采用铝合金支架连接,因铝合金质量较轻,不仅可满足试验车最大承重要求,采用支架结构还有利于以后的试验车结构上的扩展。试验车上包含的传感器有:三维激光雷达、惯导、路由器、T……继续阅读 » 一三五 5年前 (2021-04-26) 2595浏览 0评论1720个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2531浏览 0评论1437个赞
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2120浏览 0评论427个赞
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3043浏览 0评论1560个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3360浏览 0评论2878个赞
上一篇博客我们介绍了ROS试验车的结构设计(三维模型)和部分通讯设计。上篇博客中通讯设计主要介绍了使用ROS系统进行12V10Ah和12V20Ah锂电池的通讯。 我们的目标是设计一套完整的的……继续阅读 » 一三五 5年前 (2021-04-26) 2060浏览 0评论483个赞
前言 之前用turtlebot仿真过巡线机器人,但是turtlebot略显笨重,为了纪念下本科参加的飞思卡尔,尝试着做一套ROS的仿真SmartCar。 ……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2041浏览 0评论1248个赞
……继续阅读 » 吴凯荣 5年前 (2021-04-26) 1736浏览 0评论391个赞
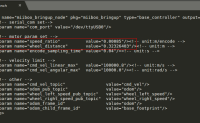
简介 今天来分享一下我是如何用最短的时间进行智能小车的PID调速的。在疫情期间比较无聊,在某宝买了一个智能小车底盘和一堆零件,基于Arduino Due和树莓派进行开发,Due负责底层控制,树莓派进行上层控制器开发,比如斯坦利控制器或者模型预测控制器进行轨迹跟踪……继续阅读 » ScottieHan 5年前 (2021-04-26) 2279浏览 0评论328个赞
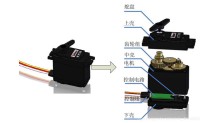
本文将会系统阐述在做智能车过程中舵机学习的注意事项 当拿到一个舵机我们应该怎么做?事先应该去做什么准备验证工作? &n……继续阅读 » 不合格的engineer 5年前 (2021-04-26) 3437浏览 0评论1201个赞
开源自主导航小车MickX4 目录 1 ROS底盘运动控制 1.1 小车控制流程图 1.2 小车控制核心代码分析 1.2.1 小车核心代码-遥控器解析 1.2.2 小车核心代码-电机反馈数据 1.2.3 小车核心代码-PI……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3757浏览 0评论1358个赞
目录 1.两种智能小车的构造简介2.需要的软件与硬件3. Car-like小车建模与仿真3……继续阅读 » ScottieHan 5年前 (2021-04-26) 2050浏览 0评论520个赞
从本文开始,在之后的一段时间里,我会通过本系列文章,详细介绍如何从零开始用51单片机去实现智能小车的控制,本文作为本系列的第一篇文章,主要介绍如何让小车动起来。 ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2898浏览 0评论1855个赞
开源自主导航小车MickX4(三)底盘ROS节点1、底盘ROS节点1.1 ROS节点功能定义1.2……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2281浏览 0评论1494个赞
我会通过本系列文章,详细介绍如何从零开始用51单片机去实现智能小车的控制,在本系列的上一篇文章中介绍了3种可用来让小车实现避障的传感器,本文作为本系列的第三篇文章,主要介绍如何让车实现自动避障。 ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2154浏览 0评论1038个赞
我会通过本系列文章,详细介绍如何从零开始用51单片机去实现智能小车的控制,在本系列的上一篇文章中介绍了如何通过手机蓝牙去控制智能小车,但是存在加减速指令异常的错误,本文主要介绍出现错误的原因,及改正方法。 本系列文章链接: ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3196浏览 0评论2911个赞
提前说说 博主是用寄存器写的驱动 历时两周,总算把小车弄好了,总体上来说做的太慢了。自己在32的学习中还不够仔细深入,只是浅面的学习,当真正做一个项目时,暴露的问题就太多了。这次在小车的制作的过程中,遇到了各种各样……继续阅读 » nidie508 5年前 (2021-04-26) 2324浏览 0评论2337个赞
这一个月来 距离实验室纳新后,已经过去一个月左右了。听取了学长的建议,这段时间也一直在搞Arduino这个软件,还算不错的认识了这个开源软件。(自我认为) 但是现在的依旧是一个小萌新,不说在软件代码的掌握程度,现在连有……继续阅读 » nidie508 5年前 (2021-04-26) 1679浏览 0评论2041个赞
有一段时间没有更新博客了,最近一段时间都在忙毕业和实习,闲暇的时候也在学习怎么写公众号推文,实在惭愧。毕业设计做的是平衡小车,这几天某宝买的器件还不知所踪,新的PCB电路板又不想画,所以在想要不把做过的过程回顾一次,以后好写论文。该项目会分“模块选型篇”、“原理篇……继续阅读 » 歌者弥城 5年前 (2021-04-26) 3318浏览 0评论2949个赞
该篇博客紧接接上一篇开题篇创 基于stm32的两轮自平衡小车1(模块选型篇)(鸽了好些日子了…)。该篇为原理篇,包含一些理论分析的部分,碰到一些自己可能写不好的地方直接引用……继续阅读 » 歌者弥城 5年前 (2021-04-26) 2652浏览 0评论1790个赞
由于学校这几天在开运动会,所以刚好有空闲的时间来好好琢磨这些原件以及认认真真完成这几篇博客。。。。 所以,这几天就好好研究这些电子元件。 那怎么具体研究呢,我想大概可以从这几个方面入手。 1.元件的介绍……继续阅读 » nidie508 5年前 (2021-04-26) 2919浏览 0评论1817个赞
此篇为硬件篇,接上一篇“基于stm32的两轮自平衡小车2(原理篇)”。包含自行设计电路板原理图与PCB电路图的过程。详见目录。 目录 stm32管脚分配……继续阅读 » 歌者弥城 5年前 (2021-04-26) 2460浏览 0评论2696个赞
今天继续来介绍这些电子元件。 4.LM2596S DC-DC降压电源模块 介绍:一块降低调整电压的元件 &n……继续阅读 » nidie508 5年前 (2021-04-26) 3618浏览 0评论504个赞
本篇是软件调试篇,接上一篇硬件篇:基于stm32的两轮自平衡小车3(硬件篇),本篇内容是对硬件部分的软件实现,具体模块详见目录。这里先上效果:……继续阅读 » 歌者弥城 5年前 (2021-04-26) 2952浏览 0评论1960个赞
到今天为止,智能小车的三种功能也算全部完成了。(做蓝牙模块异常的顺利)接下来就是焊接矩阵键盘,将这三种功能合并在一块了。可能还会需要一段时间,包括矩阵键盘的焊接,代码的规整,所有硬件的加入,功能排障以及优化。 做小车应该是学嵌入式的一个最基本的项目,就因为是第一个,……继续阅读 » nidie508 5年前 (2021-04-26) 1519浏览 0评论2206个赞
文章目录选题说明选题方向竞赛开发平台创新点描述……继续阅读 » 路拾遗37 5年前 (2021-04-26) 1795浏览 0评论2585个赞
前言 本篇主要针对制作智能小车过程中用到的各种结构模块进行统一阐述,为大家提供参考的同时也是自己对之前所做工作的总结。本人所制作的智能小车所需零部件均从某宝上购得,……继续阅读 » jiaolu295 5年前 (2021-04-26) 3454浏览 0评论546个赞
前言 本篇主要针对实现小车各功能的过程中具体的实现原理、程序算法以及遇到的问题进行统一的解释与说明。至此,结合上一篇的结构模块,已经完成了该智能小车项目的所有工作,其中必然还有很多可以优化的地方,但考虑到做此项目的最终目的是更深入的……继续阅读 » jiaolu295 5年前 (2021-04-26) 2169浏览 0评论1888个赞
遥控模式 此模式可以利用遥控器完成模式的选择和小车前进后退等驱动功能,模式选择放在最后MERGE部分进行介绍。通讯协议直接用的YFRobot工作室写好的,方便实用,自己其实只需要会用就OK啦。通讯协议部分的程序这里就不贴啦,网上都能……继续阅读 » jiaolu295 5年前 (2021-04-26) 2474浏览 0评论2557个赞
提前说说 五一小长假的最后一天,正式开始设计篇章。有种无从下笔的感觉,担心自己的博客可能会误导别人或者没有表达清楚自己的意思。所以认真观看博客的朋友如果发现有哪些地方不对劲的,欢迎与我讨论,也顺便让我不断不断修改。 接下来,就开始软件……继续阅读 » nidie508 5年前 (2021-04-26) 1770浏览 0评论1280个赞
此篇对做此项目过程中遇到的所有问题和出现的BUG(包括硬件方面和软件方面)进行总结,告诫自己要养成总结问题,汇总BUG的好习惯。前人说:工作后你会发现你学生阶段所做项目的BUG_list价值千金!……继续阅读 » jiaolu295 5年前 (2021-04-26) 1772浏览 0评论2394个赞
前言 暑假闲着也是闲着,想着还是干点有意义的事情充实一下自己,那会也在再学习C语言,就想找点能锻炼锻炼编程能力的小项目,正好逛论坛看到了别人做的智能小车,看着还挺好玩就想着自己也做一个,一方面能锻炼锻炼自己的编程能力,……继续阅读 » jiaolu295 5年前 (2021-04-26) 2245浏览 0评论2344个赞
目录一、解读launch文件:mrobot_laser_nav_gazebo.launch二、解读launch文件:gmapping_demo.laun……继续阅读 » 手可摘星辰不敢高声语 5年前 (2021-04-26) 1959浏览 0评论2519个赞
上回接寻迹功能后,这次来介绍超声波避障功能。 我们将超声波固定在舵机上,再通过对舵机的控制来实现超声波的转向。 超声波避障功能 示……继续阅读 » nidie508 5年前 (2021-04-26) 2853浏览 0评论971个赞
上回书说到,小车的超声波避障功能基本完成。那么本篇就来介绍最后一个功能,蓝牙智能控制功能。 废话不多说,来吧。 蓝牙控制功能 最令……继续阅读 » nidie508 5年前 (2021-04-26) 1851浏览 0评论1479个赞
ROS学习【18】—–利用Gazebo搭建赛道,控制小车完成比赛目录一、 ROS仿真功能包下载编译……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 2505浏览 0评论2363个赞
引言 在这个-SLAM建图和导航仿真实例-项目中,主要分为三个部分,分别是 (一)模型构建(二)根据已知地图进行定位和导航(三)使用RTAB-MAP进行建图和导航……继续阅读 » Stan Fu 5年前 (2021-04-26) 1992浏览 0评论2719个赞