摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2832浏览 0评论313个赞
前言 接上篇博客:ros机器人编程实践(12.1)- 用turtlebot仿真巡线机器人 <……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2582浏览 0评论688个赞
……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 3583浏览 0评论1793个赞
Hello! 欢迎来到我的博客 今天的内容关于机器人中常用的传感器IMU,我们用它来实现机器人姿态、速度、位置的估计。 今天将会介绍使用低成本IMU进行机器人运动估计的一个常用方法——ESKF。……继续阅读 » 西涯先生 5年前 (2021-04-26) 2056浏览 0评论2991个赞
Hello! 欢迎来到我的博客 今天的内容关于机器人中常用的传感器IMU,我们用它来实现机器人姿态、速度、位置的估计。 今天将会介绍使用低成本IMU进行机器人运动估计的一个常用方法——ESKF。 3 ……继续阅读 » 西涯先生 5年前 (2021-04-26) 3999浏览 0评论1864个赞
一、安装 语音识别安装参考文章:安装教程 ……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3169浏览 0评论2309个赞
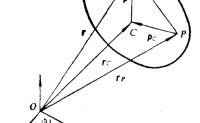
上一篇文章中,写过了关于两连杆机器鱼建模的方法。实际上,有一个细节值得注意,那就是在联立(1)和(2)方程,求解鱼头加速度,这一步中,是如何联立求解的。一般有两种方式: ……继续阅读 » 西涯先生 5年前 (2021-04-26) 2203浏览 0评论1264个赞
前言 上一篇博客:ros机器人编程实践(15.2)- 使用科大讯飞语音控制turtlebot导航 在上一篇博客中我们已经实现了语音……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2695浏览 0评论282个赞
刚体动力学基础学习 ……继续阅读 » 西涯先生 5年前 (2021-04-26) 3141浏览 0评论1026个赞
关于机器人运动学与动力学建模的几点迷思疑问1:运动学应该从速度开始推还是从位置开始推? 为什么会产生这样的疑问?我们可以从下面这个问题开始!……继续阅读 » 西涯先生 5年前 (2021-04-26) 3218浏览 0评论2093个赞
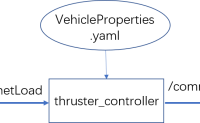
现在开始介绍demo的基础控制模块程序。基础控制模块包含推力分配模块、PWM波计算模块,数据串口下发模块。每个模块的主要功能可以回头看软件框架简介的那一篇文章,在此不做介绍,后续主要介绍的是程序中的一些关键点。 本文主要介绍的推力分配模块的几个关键函数。对应程序中的……继续阅读 » cabinx 5年前 (2021-04-26) 3187浏览 0评论1402个赞
本文介绍手柄控制模块的代码。模块对应cabin_teleop。结合前几篇关于基础运动模块代码的解析,显然我们只需要操控手柄发布力和力矩的信息[Fx,Fy,Fz,Mx,My,Mz]即可实现对机器人的控制。如发布[10,0,0,0,0,0]即表示对机器人施加x轴方向10N的力,机器人……继续阅读 » cabinx 5年前 (2021-04-26) 2875浏览 0评论1690个赞
嗨伙计们,我又来啦~ 想了这么长时间,终于准备着手了!今天跟大家一起分享下webots中是如何实现LQR控制的。 今天就不多啰嗦了,下面开始进入我要跟大家分享的内容。 还是老样子,我们先来介绍一下文章安排:第一部分,我们将在webots中……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 2898浏览 0评论791个赞
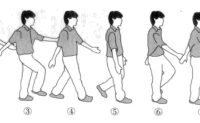
引言 放假前看了一本书:09年坂本范行的《双足步行机器人DIY》,由于该书重点强调实践DIY,在此记录下部分有点启发、有点东西的知识:比如切比雪夫联杆结构、静步行、……继续阅读 » aic1999 5年前 (2021-04-26) 3428浏览 0评论1464个赞
一、动力学基础概念 基本动力学模型 ……继续阅读 » white_Learner 5年前 (2021-04-26) 3188浏览 0评论1385个赞
嗨伙计们,我又来啦~ 在上次的文章[《webots玩转控制论之LQR控制器》](https://www.guyuehome.com/17688)中,我们假设系统是全状态反馈的……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 2092浏览 0评论2969个赞
【从零开始的ROS四轴机械臂控制(五)】八、运动控制节点1.定义服务GoToP……继续阅读 » Stan Fu 5年前 (2021-04-26) 2677浏览 0评论2484个赞
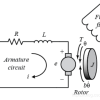
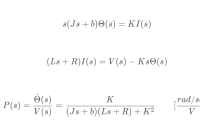
文章目录Matlab 仿真——直流电机速度控制(1)直流电机建模1. 物理模型 <……继续阅读 » chuchu 5年前 (2021-04-26) 3182浏览 0评论1077个赞
文章目录 1、现实差2、 提高仿真度前提2.1、执行器模型< ……继续阅读 » 我是。 5年前 (2021-04-26) 3000浏览 0评论1765个赞
文章目录Matlab 仿真——直流电机速度控制(2)系统分析0. 被控对象与设计要求1. 开环响应 ……继续阅读 » chuchu 5年前 (2021-04-26) 3010浏览 0评论584个赞
在之前的move_group界面中,当点击plan and execute之后,move_group就会帮我们规划出一条通往指定位姿的轨迹,发布在follow_joint_trajectory上,通过rostopic echo /redwall_arm/fol……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3094浏览 0评论2110个赞
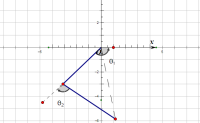
一、平面运动学建模 本篇将会对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 不考虑横向髋关节运动时,四足机器人的腿部可以简化成二连杆机构 1、几何建模……继续阅读 » 我是。 5年前 (2021-04-26) 3027浏览 0评论2623个赞
随着科学技术的发展,机器人逐渐从荧幕上走入现实,但要达到影视中那样的智能和高端还尚需一段时间。个人看来,最符合我们对机器人印象的研发机构当属波士顿动力,该公司每年发布的机器人视频都足以震撼人们的眼球,与现实中人的运动能力越来越贴近。这一系列文章将深入学习波士顿动力机器人的技术细节……继续阅读 » 挽风 5年前 (2021-04-26) 3073浏览 0评论1445个赞
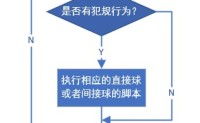
有限状态机它代表有限数量的状态以及各个状态之间进行跳转的动作。举个例子来说,我们现在……继续阅读 » better_coder 5年前 (2021-04-26) 2163浏览 0评论2921个赞
正运动学解 ……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 1787浏览 0评论1861个赞
写在前面……继续阅读 » better_coder 5年前 (2021-04-26) 2960浏览 0评论2927个赞