……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1927浏览 0评论947个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3147浏览 0评论842个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3720浏览 0评论1654个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3395浏览 0评论2984个赞
原文链接:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2240浏览 0评论1263个赞
随着人工智能的发展,机器人也迎来了全新的发展机遇。机器人与人工智能大潮的喷发,必将像互联网一般,再次为人们的现代生活带来一次全新的革命。1. 历史起源硬件技术的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2924浏览 0评论1834个赞
2018年1月7日下午,第一届ROS Taipei年会顺利在台北举办,我有幸受邀参加了这次活动,并详细介绍了近两年来自己使用ROS进行机器人开发的具体细节。 在这次年会上,来自各地的开……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2495浏览 0评论2684个赞
上篇讲到,在通信机制部分,我们完全舍弃了ROS基于话题和服务的通信机制,自己又实现了一套通信系统,具体的实现主要基于Linux系统的各种通信方式,此处暂且不表,这篇我们来看下ROS另外一个重要部分——开发工具,如何在机器人产品化过程中应用。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1686浏览 0评论1065个赞
上篇我们讲到ROS中的开发工具,可以提高我们的开发效率,每一种工具都有其擅长之地,也有其不足之处,所以在设计、开发机器人产品的过程中,可以综合考虑,发挥每一个开发工具的优势。本篇我们来分析一下ROS中丰富的应用功……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2453浏览 0评论295个赞
最近在知乎上看到一个问题:在ROS环境下,怎么使用moveit!来驱动真实的六轴机械臂? 很多小伙伴在使用ROS的时候,都会产生类似的疑问,程序写过那么多,仿真也跑过不少,但是如何控……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1928浏览 0评论746个赞
2011年创建了ROS博客“古月居”<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2107浏览 0评论1852个赞
原作者:Erico Guizzo 文章来源:IEEE Spectrum ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3117浏览 0评论156个赞
大家好,我是小明,很高兴我们又见面了!今天谈的领域并非我的专业方向,但也同样有趣,初次接触时让我备受启发,因此分享给大家。和上次一样,本文的工程也为大家提供了源代码,方便交流学……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2773浏览 0评论617个赞
一,实现效果:原理主要就是订阅机器人的odom话题,然后利用信号与槽更新ui仪表……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2491浏览 0评论863个赞
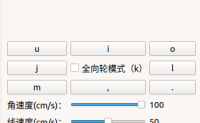
我这里主要就是参考teleop_twist_keyboard项目的源代码,移植到自己程序一,首先在ui界面添加按钮(注意按钮上显示的文字):……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3184浏览 0评论2905个赞
一,实现效果二,核心代码主要就是这么几句:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2994浏览 0评论670个赞
关注于机器人行业的人,大抵或多或少地了解过ROS。ROS是机器人操作系统的简称,是目前世界上最火的开源机器人研发框架,已经被成功部署到了许多的机器人产品当中。 ROS社区是ROS开发者、使用者、学习者等等ROSer们在线互动的平……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2579浏览 0评论2087个赞
前言本节教程演示UUV的一些玩法,基于开源项目UUV,官方介绍文档:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3114浏览 0评论1981个赞
原作者:Evan Ackerman文章来源:IEEE ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3307浏览 0评论1185个赞
原理对于ROS里面用Python写的节点,是可以直接用 python your_node_name<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3479浏览 0评论2056个赞
本文转载自The Construct,原作者 Ricardo Tellez 原文链接:https://www.theconstructsim.com/top-10-influential-people-in-ros/……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1881浏览 0评论2275个赞
相信大家在编译运行某个节点文件经常会出现节点文件无法被找到的情况,或者在运行时不知道文件的位置、不知道该如何监听数据来进行调试等问题。 为了方便大家更熟悉ROS的操作,同时方便大家的调试,本次更新一起关于ROS常用package、bag、Node、Topic、Ser……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2304浏览 0评论666个赞
需求:TX2连接Lidar获取点云数据,由于TX2安装在机器人上,不能外接屏幕,内存ROM也很小,所以采用TX2与雷达建立通讯,然后建立TX2和PC机的ROS远程通讯(PC机和TX2都安装ubuntu18.04) PC机和TX2全部为系统为18.04,ROS版本全部为melodi……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2368浏览 0评论2458个赞
两者的区别 二进制包是直接通过apt方式安装了ROS相关的软件包,而我们在GitHub上下载自己需要的源码来进行代码复用,编译通过生成可运行节点后的包是源码包,两者是可以共存的,但是运行时只能运行bash/zsh文件中默认环境下的包……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2093浏览 0评论413个赞
rosbag既可以指命令行中数据包相关命令,也可以指 c++/pythond的 rosbag 库。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1968浏览 0评论1681个赞
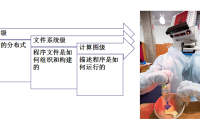
前言: 本文中,主要是关于OpenCV格式图片(或视频帧)和ROS数据格式图片(或视频帧)之间的转换。或者直白点书,通过ROS发送图片(Image)数据类型的消息(message)。 本文其实是为……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1543浏览 0评论1642个赞
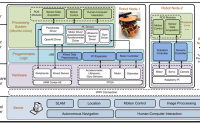
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1842浏览 0评论1876个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2863浏览 0评论2540个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2349浏览 0评论958个赞
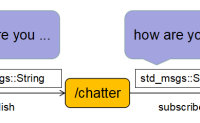
前言 记录下学习过程,《ros机器人编程实践》第三章第一个例子讲的不是很清楚……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2724浏览 0评论1870个赞
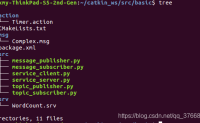
前言 《Ros机器人编程实践》第三章例程二定义虚数数据类型。 实现过程 创建工作区参见上一章博客: ros机器人编程……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1652浏览 0评论281个赞
注:本篇博文全部源码下载地址为:Git Repo……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1899浏览 0评论456个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2843浏览 0评论1200个赞
原作者:Evan Ackerman 文章来源:IEEE Spectrum 编译:沈永强 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1827浏览 0评论1620个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2773浏览 0评论2703个赞
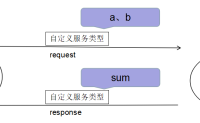
前言 在ros中定义一个服务,计算字符串中单词的数量 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1858浏览 0评论1096个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2084浏览 0评论2082个赞
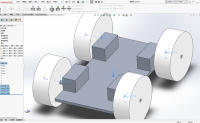
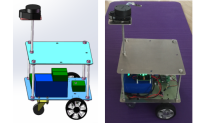
一、是什么开源项目? 从本博文开始将开源一个基于ROS系统的自主移动机器人项目,该项目基于一个差动轮机器人平台展开,机器人的设计效果图和实物图如下图1所示。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2657浏览 0评论2576个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2555浏览 0评论2727个赞
前言 《ros机器人编程实践》— 第五章动作的定义。 前面尝试了定义自己的消息类型和服务,接下来是定义动作。服务只适用于及时响应的消息类型,和编程的函数基本类似,有自己的输入输出。但是在解决机器人运作问题上服务显然就不够用了,就好比投篮,我们用服务来写只能做到写……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2701浏览 0评论2711个赞
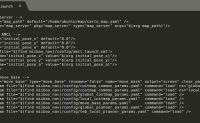
前言 《ros机器人编程实践》第六章机器人与仿真 子系统概念 子系统:机器人通过建立子系统的方法来简化设计和分析过程。 执行子系统:直接与机器人轮子或者机械臂交互感知子系统:直接与传感器交互……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1797浏览 0评论402个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1871浏览 0评论1307个赞
中国机器人操作系统(ROS)暑期学校自2015年举办以来,被ROS开源基金会誉为除了ROSCon之外的规模最大、参与人数最多、最成功的ROS线下活动。过去五年间,中国机器人操作系统(ROS)暑期学校共吸引了全国2……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2372浏览 0评论822个赞
前言 注意:因为版本原因没能成功操作R2,还在探索阶段,这里只是记录安装过程。 NASA的R2机器人已经在空间站成功的部署了,可是这个开源机器人在ros平台上的资源很少,估计都被人遗忘了,R2机器人拥有两条机械臂以……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3104浏览 0评论2290个赞
今日份的ROS暑期学校讲座圆满结束,各位老师们辛苦了!也非常感谢同学们的热情参与! 今天的直播内容可以回看视频啦,登录古月学院进入今天的直播间即可回看。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1712浏览 0评论2309个赞