我这里主要就是参考teleop_twist_keyboard项目的源代码,移植到自己程序
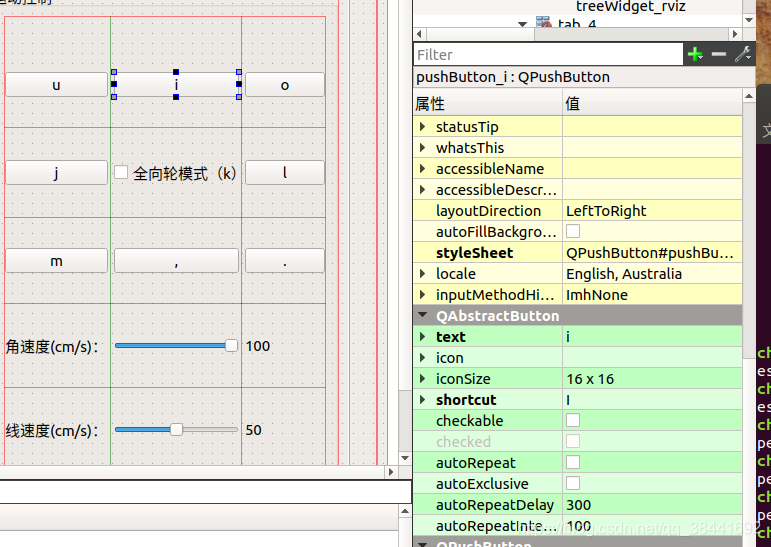
一,首先在ui界面添加按钮(注意按钮上显示的文字):
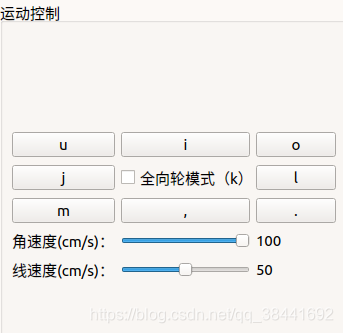
同时在ui界面设置每个按钮的shortcut(热键),就能实现键盘控制:
二,关联这些按钮的点击事件到同一槽函数
//绑定速度控制按钮
connect(ui.pushButton_i,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_u,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_o,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_j,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_l,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_m,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_back,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_backr,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
槽函数:
#ifndef CCTRLDASHBOARD_H
#define CCTRLDASHBOARD_H
#include <QWidget>
class CCtrlDashBoard : public QWidget
{
Q_OBJECT
public:
enum StyleType {
ST_DEFAULT=0,//速度控制相关按钮处理槽函数
void MainWindow::slot_cmd_control()
{
QPushButton* btn=qobject_cast<QPushButton*>(sender());
char key=btn->text().toStdString()[0];
//速度
float liner=ui.horizontalSlider_linear->value()*0.01;
float turn=ui.horizontalSlider_raw->value()*0.01;
bool is_all=ui.checkBox_use_all->isChecked();
switch (key) {
case 'u':
qnode.move_base(is_all?'U':'u',liner,turn);
break;
case 'i':
qnode.move_base(is_all?'I':'i',liner,turn);
break;
case 'o':
qnode.move_base(is_all?'O':'o',liner,turn);
break;
case 'j':
qnode.move_base(is_all?'J':'j',liner,turn);
break;
case 'l':
qnode.move_base(is_all?'L':'l',liner,turn);
break;
case 'm':
qnode.move_base(is_all?'M':'m',liner,turn);
break;
case ',':
qnode.move_base(is_all?'<':',',liner,turn);
break;
case '.':
qnode.move_base(is_all?'>':'.',liner,turn);
break;
}
}
ST_ARCBAR
};
explicit CCtrlDashBoard(QWidget *parent = nullptr, StyleType type=ST_DEFAULT);
void setValue(qreal value)
{
m_DashValue = value;
update();
}
void setBackGroundColor(QColor color)
{
m_BgColor=color;
update();
}
void setFrontColor(QColor color)
{
m_FrontColor=color;
update();
}
void setBorderColor(QColor color)
{
m_BorderColor=color;
update();
}
void setUnitString(QString str)
{
m_StrUnit=str;
update();
}
void drawBackGround(QPainter *painter, qreal hlafWidth);
void drawScaleDials(QPainter *painter, qreal hlafWidth);
void drawIndicator(QPainter *painter, qreal hlafWidth);
void drawIndicatorBar(QPainter *painter, qreal hlafWidth);
signals:
public slots:
protected:
virtual void paintEvent(QPaintEvent * event);
private:
int m_StartAngle;
int m_EndAngle;
int m_StyleType;
qreal m_LineLength;
qreal m_DashValue;
qreal m_MaxValue;
qreal m_MinValue;
qreal m_DashNum;
QColor m_BgColor;
QColor m_FrontColor;
QColor m_BorderColor;
QString m_StrUnit;
qreal m_MaxBorderRadius;
qreal m_MinBorderRadius;
qreal m_DialsRadius;
};
#endif // CCTRLDASHBOARD_H
创建发布者:
//速度控制话题
cmd_pub = n.advertise<geometry_msgs::Twist>("cmd_vel", 1);
qnode.move_base:
//发布机器人速度控制
void QNode::move_base(char k,float speed_linear,float speed_trun)
{
std::map<char, std::vector<float>> moveBindings {
{'i', {1, 0, 0, 0}},
{'o', {1, 0, 0, -1}},
{'j', {0, 0, 0, 1}},
{'l', {0, 0, 0, -1}},
{'u', {1, 0, 0, 1}},
{',', {-1, 0, 0, 0}},
{'.', {-1, 0, 0, 1}},
{'m', {-1, 0, 0, -1}},
{'O', {1, -1, 0, 0}},
{'I', {1, 0, 0, 0}},
{'J', {0, 1, 0, 0}},
{'L', {0, -1, 0, 0}},
{'U', {1, 1, 0, 0}},
{'<', {-1, 0, 0, 0}},
{'>', {-1, -1, 0, 0}},
{'M', {-1, 1, 0, 0}},
{'t', {0, 0, 1, 0}},
{'b', {0, 0, -1, 0}},
{'k', {0, 0, 0, 0}},
{'K', {0, 0, 0, 0}}
};
char key=k;
//计算是往哪个方向
float x = moveBindings[key][0];
float y = moveBindings[key][1];
float z = moveBindings[key][2];
float th = moveBindings[key][3];
//计算线速度和角速度
float speed = speed_linear;
float turn = speed_trun;
// Update the Twist message
geometry_msgs::Twist twist;
twist.linear.x = x * speed;
twist.linear.y = y * speed;
twist.linear.z = z * speed;
twist.angular.x = 0;
twist.angular.y = 0;
twist.angular.z = th * turn;
// Publish it and resolve any remaining callbacks
cmd_pub.publish(twist);
ros::spinOnce();
}
三,完整开源项目
在我自己学习的过程中目前发现没有相关类似完整开源项目,为了帮助其他人少走弯路,我决定将自己的完整项目开源:
github
本人原博客地址:




