今日份的ROS暑期学校讲座圆满结束,各位老师们辛苦了!也非常感谢同学们的热情参与! 每天24:00前进入当天的直播间……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1946浏览 0评论2046个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2361浏览 0评论1215个赞
今日份的ROS暑期学校讲座圆满结束,各位老师们辛苦了!也非常感谢同学们的热情参与! 每天24:00前进入当天的直播间……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1635浏览 0评论1092个赞
今日份的ROS暑期学校讲座圆满结束,各位老师们辛苦了!也非常感谢同学们的热情参与! 每天24:00前进入当天的直播间学习即签到成功,连续签到6天,即可获得领取……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1581浏览 0评论2706个赞
2020的ROS暑期学校讲座已圆满结束,各位老师们辛苦了!也非常感谢同学们的热情参与!6天+30位分享者今年,由于疫情影响,……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2601浏览 0评论2977个赞
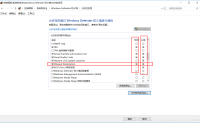
描述:本来VMware用着很好,升级系统之后第二天发现打开软件特别慢,特别是还转圈圈,VMware打开需要半天才进入、打开系统很慢、运行很慢,其实导致这个软件的原因就是软件被防火墙阻截了!……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3288浏览 0评论1062个赞
上一讲我们讲了如何发布接收int,float和array类型的消息,这些也都算是c++自有的消息,被归纳在ROS中的std_msgs这个命名空间下(命名空间skr啥?).这讲我们来看看如何发布接收ROS自己独特的message类型:PoseStam……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2150浏览 0评论943个赞
本文作者:陈瓜瓜 许久没更新了,放假回家没想到还要被老师催论文,连玩耍的时间都不够= =.好了,闲话少说 例1 上一讲讲了一些类什么的基础.这一讲我们就谈谈怎么在类中发布和接收消息了.当你遇到稍微大型一点的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3338浏览 0评论2912个赞
之前我们一直在用rosrun跑程序,格式如下 rosrun package_name executable_file_name &nbs……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2837浏览 0评论1016个赞
欢迎来到第七讲,我居然能写这么多,撒花!! rosbag是用来储存ros消息的东西。 在我们平时处理一些robotics问题的时候,我们得到一些数据,有些时候我们需要实时的处理,即获得数据,写好的程序分析数据然后得出结果,但另一些时候 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2896浏览 0评论1233个赞
当前,水下领域比较小众,开源的资料比较少。Bluerov作为成熟的产品,结合其开源的优势,经历了多年的技术迭代,在市场上受到极大欢迎。刚接触水下领域时,希望能找到一个比较方便的实验平台,开源的Bluerov基本上算是唯一的选择。 Bluerov本身的软件架构,Pix……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2846浏览 0评论1777个赞
欢迎来到第8讲,预计还有两讲结束ROS相关的话题。 Rviz作为ROS的可视化工具拥有非常强大的功能,我也不是全部都用过,略懂皮毛。可视化是我们分析问题,向他人展现成果时最重要的工具。打个比方,我们在第三讲能够发布poseS……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2728浏览 0评论2588个赞
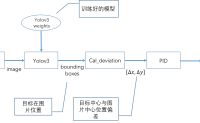
本文主要介绍ROV水下目标跟踪的简易demo软件实现的思路。 一、视觉模块 视觉模块的任务为:通过单目相机识别目标,并计算目标中心位置与图像中心位置的偏差,通过PID控制器得到控制量。demo中得到的控制量可以理解为竖直方向的推力……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3356浏览 0评论1252个赞
你问古月答 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1824浏览 0评论1278个赞
欢迎来到最后一讲。关于自定义消息类型网上已经有一些文章了,写地也明了,不过这这里会补充的几点就是你自定义了一个新的消息类型之后在不同的package和不同的workspace中如何使用,当然我们仍然从基本的讲起。 定制基本消息……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1677浏览 0评论2862个赞
文章目录本文软件版本jointSpaceMotionModel……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2893浏览 0评论2709个赞
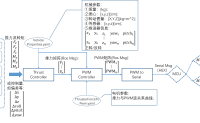
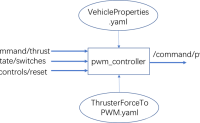
这部分内容相当简单,基本上读懂推进器电机模型文件就很容易能读懂程序。可以查阅之前撰写的关于电机模型文件的文章(链接)。程序对应c……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2808浏览 0评论1544个赞
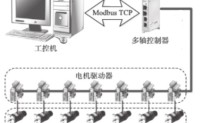
模块对应cabin_controllers/serial_to_mcu。模块实现的功能为监听网络中PWM矩阵信息,将其转换成十六进制数据通过串口下发至MCU,实现对推进器电机的控制。模块数据的串口通信借助了ros的serial工具包(sudo apt-get install ro……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2717浏览 0评论827个赞
在上一个博文中介绍了一个简单的目标识别的例子,在这篇博客中,例如是别的结果,完成机械臂的抓取控制,主要进行程序的分析和学习。 包含的头文件: #include <……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3640浏览 0评论508个赞
Service通讯和代码练习六、Service通讯6.1 Server端创建6.1.1 创建节点……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3539浏览 0评论2119个赞
msg消息和srv消息八、msg消息8.1 基本概念8.2 常见Msg消息 <……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1943浏览 0评论2014个赞
ROS是什么? ROS=通信机制+开发工具+应用功能+生态系统 节点(Node)–执行单元 执行具体任务的进程、独立运行的可执行文件; 不同节点可使用不同的编程语言,可分……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3478浏览 0评论1946个赞
目录 前言1 配置环境① 背景……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3489浏览 0评论1920个赞
fake_ar_publisher::ARMarkerConstPtr last_msg_;void visionCallback(const fake_ar_publisher……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2725浏览 0评论570个赞
在上一篇博客中,我们介绍了怎么创建一个ROS的最小系统,该系统包括工作空间、包和一个存放在包中的节点,然后我们让该节点打印“Hello ROS”。 在这一篇博客中,我们将……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2248浏览 0评论608个赞
上一篇文章我们介绍了ros最小话题系统的制作,本篇将进一步介绍ROS的另一种节点间的交互形式—服务 首先,什么是服务? ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2429浏览 0评论2780个赞
根据之前的配置,我们已经可以通过move_group发送出机械臂各关节运动的轨迹,并且通过三次样条插补的方法,赋予各个关节在特定角度时的速度和加速度,通过启动程序节点可以看到,本次运动规划使用了LBKPIECE算法,并且使用了4线程并行规划,规划时间为3.47875……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1738浏览 0评论1007个赞
在ROS节点中解析并发送点云数据是非常基础的需求,下面我们将做简单的介绍。 点云数据发送 关于发送节点,只需要声明头文件:  ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3496浏览 0评论534个赞
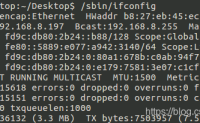
ROS是一种分布式软件框架,节点之间通过松耦合的方式进行组合,在很多应用场景下,节点可以运行在不同的计算平台上,通过Topic、Service进行通信。但是ROS中只允许存在一个Master,在多机系统中Master只……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2804浏览 0评论1739个赞
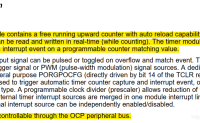
之前的博客为了实现延时特定时间(4ms)并在这段时间内产生PWM波形,使用了两种方法,第一种通过计数的方式,比较low;第二种使用PRU的工业级定时器IEP,时钟频率200MHZ,使用也很简单。 但是随着实验的进行,因为是六自由度的机械臂,计划使用三块beagleb……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2187浏览 0评论412个赞
1 异常报警:package ‘orocos-bfl’ not found: -- Found PkgConfig: /usr/bin/pkg-config (fou……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3608浏览 0评论2660个赞
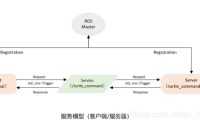
话题模型 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2799浏览 0评论2230个赞
在ROS Master的管理之下有client和server两个节点,下面要实现的是server端,server端用来给海龟发送速度的指令,通过topic来发,service功能是以client端发布request控制server是不是要给海龟发速度指令,client端是海龟运动……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3632浏览 0评论1643个赞
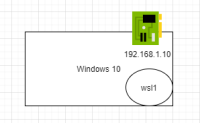
一、 鲁迅说过:“不能一口吃个胖子。” 这句话是有道理的。前段时间测试wsl2安装ROS引导ABB机器人,碰了钉子。今天网上搜了一下wsl的网络配置,发现用wsl要比wsl2简单很多。 WSL1 是共享宿主机的网络栈,即 WSL1 共享主机 IP,并没有自己独立的逻辑网卡,也即没……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1611浏览 0评论943个赞
为了使创建的URDF机器人模型正确运动,必须给出robot_state_publisher 节点所需的sensor_msgs::JointState型topic:joint_states。可参见:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3009浏览 0评论1401个赞
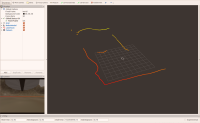
首先感谢实验课的助教工作,然我看到了学生们的热情以及大家的智慧。这是我在其中绘图机器人实验的基础上进行复现完成的一次demo演示。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2474浏览 0评论1611个赞
使用eigen库进行空间变换 在三维空间中,常常需要变换当前机器人的位姿计算定义的绝对坐标系和当前机器人所处相对坐标系之间的关系。而主要的变换则是平移和旋转,有时候可能需要尺度变换,那么就可以描述为: &nb……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2889浏览 0评论1302个赞
参考:ros::NodeHandle::advertiseServ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3027浏览 0评论1743个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1710浏览 0评论1764个赞
hector_quadrotor编译总结 | ubuntu 14.04 ros-indigo版本基于Ubuntu 14.04 LTS系统所用ROS版本为 Indi……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3067浏览 0评论1577个赞
hector_quadrotor编译总结 | ubuntu 16.04 ros-kinetic版本基于Ubuntu 16.04 LTS系统所用ROS版本为 Kin……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2514浏览 0评论371个赞
在无人车系统(十一):轨迹跟踪模型预测控制(MPC)原理与python实现【40行代码】中介绍了MPC……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2159浏览 0评论784个赞
car_demo|无人车仿真环境全教程最近需要在Ackerman(阿克曼)……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2960浏览 0评论2934个赞
准备工作安装桌面完整版ROSsu……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2417浏览 0评论357个赞
local costmap empty using move_base_node|turtlebot_stage在我运行roslaunch turtlebot_stage turtlebot_in_stage.la……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3037浏览 0评论1279个赞













![[ros2学习]-CLI Tools](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200402100521112.png&h=123&w=200&q=90&zc=1&ct=1)