运行 roslaunch …_moveit_config moveit_planning_execution.launch 报错
1、[ERROR] Action client not connected: manipulator_controller/follow_joint_trajectory
 解决:找到 ros_controllers.yaml 文件,如图1位置,将其数据更改为图2 图1
解决:找到 ros_controllers.yaml 文件,如图1位置,将其数据更改为图2 图1
 图2
图2
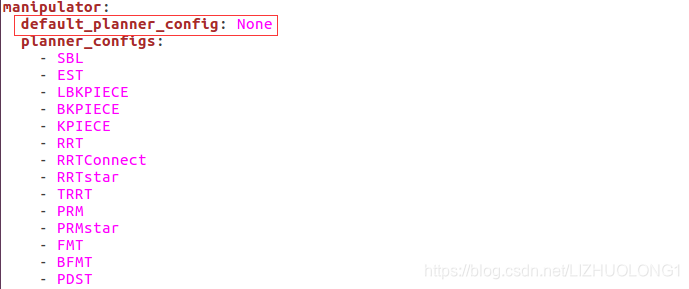
 2、[ERROR] Could not find the planner configuration ‘None’ on the param server
2、[ERROR] Could not find the planner configuration ‘None’ on the param server
 解决:ompl_planning.yaml 文件,找到 default_planner_config: None,删除即可
解决:ompl_planning.yaml 文件,找到 default_planner_config: None,删除即可
 3、[….launch] is neither a launch file in package […] nor is […] a launch file name The traceback for the exception was written to the log file
3、[….launch] is neither a launch file in package […] nor is […] a launch file name The traceback for the exception was written to the log file
 解决:要是执行后还不行,就删掉catkin_ws中的 devel和 build 文件,再次执行以下操作
解决:要是执行后还不行,就删掉catkin_ws中的 devel和 build 文件,再次执行以下操作
cd ~/catkin_ws
catkin_make




