在无人车系统(十一):轨迹跟踪模型预测控制(MPC)原理与python实现【40行代码】中介绍了MPC方法在无人车轨迹跟踪中的应用。以Udacity中的例子作为引子,详细介绍了MPC的原理,无人车的运动学模型,以及给出基于python的实现。Udacity的仿真器是一些特定的环境,没有ros中的stage或gazebo灵活。本文以turtlebot的轨迹跟踪任务作为引子,介绍在ROS Stage仿真环境中的实现移动机器人轨迹跟踪控制。
1. 仿真环境设置
1.1 更改stage环境地图
ubuntu 18.04+ros melodic
- 首先,请参照install turtlebot on ubuntu 18.04 + ros melodic在melodic版本的ROS中安装好turtlebot。
- 然后,参照tturtlebot_stageTutorialsindigoCustomizing the Stage Simulatorr熟悉如何在stage仿真环境中使用自己的地图,以及如何在仿真环境中增减障碍物。stage仿真环境设置过程中重要的三个文件后缀分别为:“.png,.world,.yaml”。其中”.png”为地图的图片,”.world”为整个环境的配置文件(包括地图,机器人,障碍物等),”.yaml”为地图的配置文件。因此,更改要将turtlebot stage中的原始地图更改成自己的地图,只需要将.png与.yaml文件替换原始的.png与.yaml文件。
例如:
- test.png图片为
- test.yaml文件内容如下
image: test.png
resolution: 0.05
origin: [0.0, 0.0, 0.0]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196
3.stage/test.world文件内容如下:
include "turtlebot.inc"
include "myBlock.inc"
define floorplan model
(
# sombre, sensible, artistic
color "gray30"
# most maps will need a bounding box
boundary 1
gui_nose 0
gui_grid 0
gui_outline 0
gripper_return 0
fiducial_return 0
laser_return 1
)
resolution 0.02
interval_sim 100 # simulation timestep in milliseconds
window
(
# size [ 600.0 700.0 ]
size [ 600.0 600.0 ]
center [ 0.0 0.0 ]
rotate [ 0.0 0.0 ]
scale 60
)
floorplan
(
name "test"
bitmap "../test.png"
size [ 15.0 15.0 2.0 ]
pose [ 7.5 7.5 0.0 0.0 ]
)
# throw in a robot
turtlebot
(
pose [ 2.0 1.5 0.0 0.0 ]
name "turtlebot"
color "green"
)
4.在.bashrc文件(打开.bashrc文件在终端使用命令gedit ~/.bashrc)中未尾添加如下内容,替换原始stage环境
export TURTLEBOT_STAGE_MAP_FILE=/program/turtlebot_world/test.yaml
export TURTLEBOT_STAGE_WORLD_FILE=/program/turtlebot_world/stage/test.world
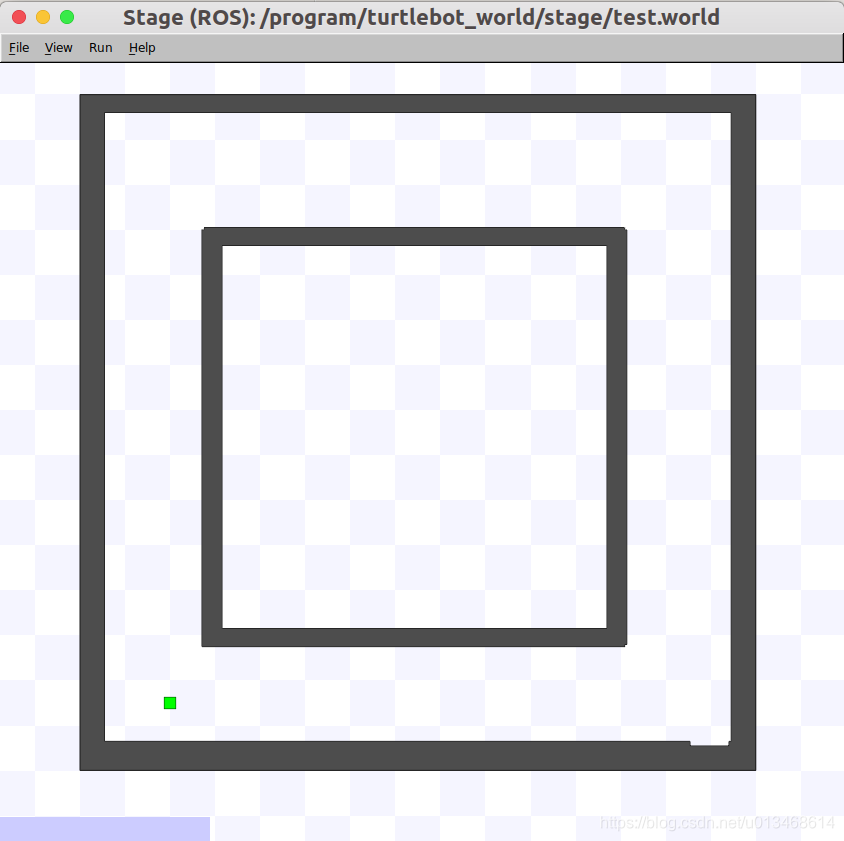
- 运行
roslaunch turtlebot_stage turtlebot_in_stage.launch,发现环境地图已经成功更改为自己的地图。
1.2 获取要跟踪的轨迹
1.2.1 获取路点
点击rviz工具栏中的”+”号,在新出现的界面中选择“PublishPoint”,点击OK退出该界面。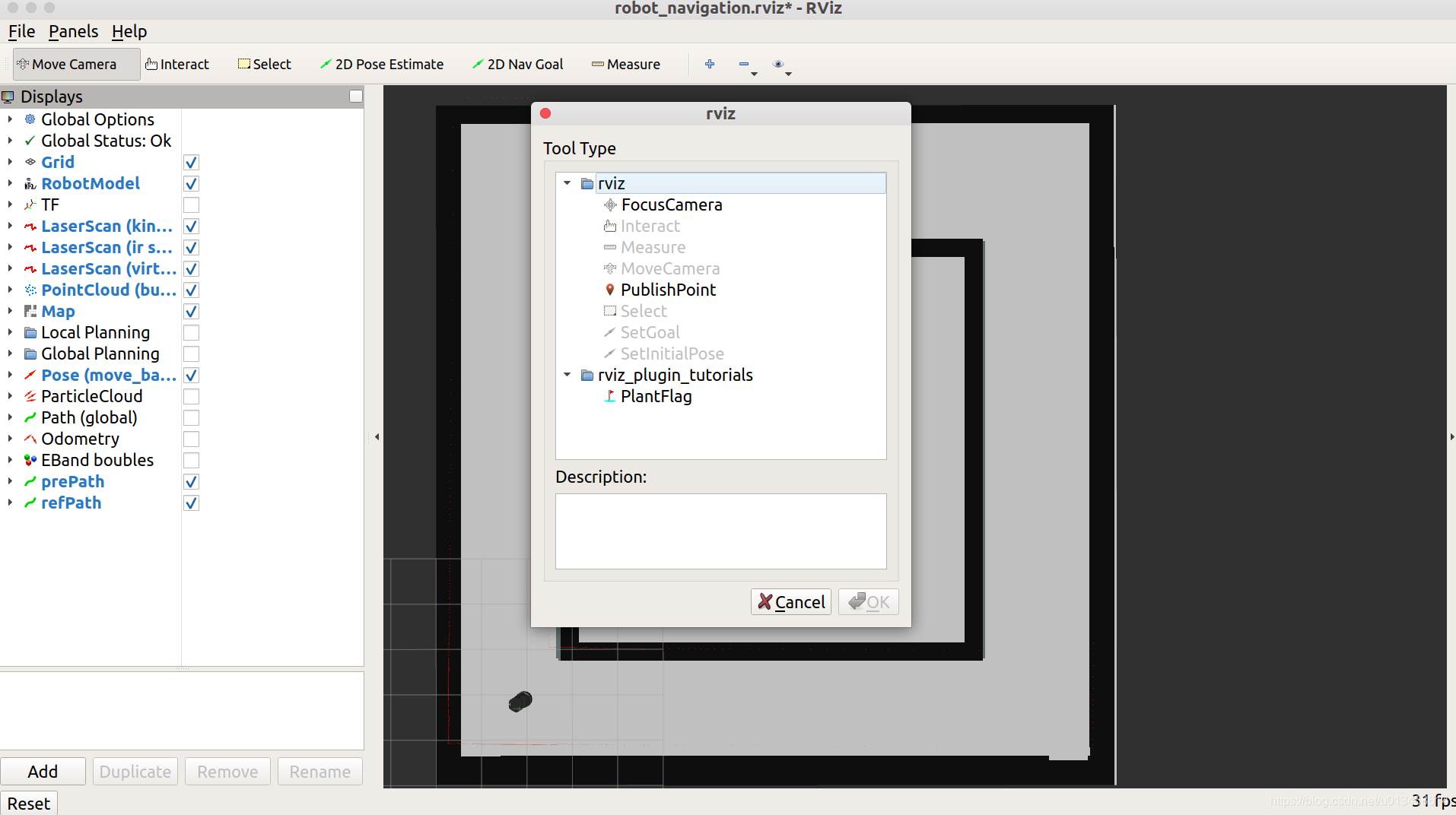
上面工具栏就会多出一个“Publish Point”,每点击一次该按钮,就可以在RVIZ界面中点击任意位置,并通过名称为“/clicked_point”的Topic发出该位置在“/map”坐标系下的位置(x,y)。

可采用如下程序来依次记录选取的路点(保存为“wps.txt”):
import rospy
import numpy as np
from geometry_msgs.msg import PointStamped
class Turtlebot_core():
def __init__(self):
rospy.init_node("Turtlebot_core", anonymous=True)
self.wps_buf = []
rospy.Subscriber("/clicked_point", PointStamped, self.wpsCallback, queue_size=1)
rospy.spin()
def wpsCallback(self, data):
p1 = np.zeros(2)
p1[0] = data.point.x
p1[1] = data.point.y
self.wps_buf.append(p1)
np.savetxt("wps.txt", np.array(self.wps_buf))
print("save way point success!!!")
print("p:"+str(p1))
if __name__ == "__main__":
turtlebot_core = Turtlebot_core()
wps.txt文件内容如下
2.775404453277587891e+00 1.849611759185791016e+00
3.828148126602172852e+00 1.734118461608886719e+00
5.651257514953613281e+00 1.688370704650878906e+00
7.475209712982177734e+00 1.680246791839599609e+00
9.300391197204589844e+00 1.697043418884277344e+00
1.103435707092285156e+01 1.695110073089599609e+00
1.266803169250488281e+01 1.93492584228515625e+00
1.315559005737304688e+01 3.573270320892333984e+00
1.319308471679687500e+01 5.110162258148193359e+00
1.324398708343505859e+01 6.808045387268066406e+00
1.320587062835693359e+01 8.812158584594726562e+00
1.317775154113769531e+01 1.039849281311035156e+01
1.308286705017089844e+01 1.215956592559814453e+01
1.269116973876953125e+01 1.304349098205566406e+01
1.132855510711669922e+01 1.330544090270996094e+01
1.001482582092285156e+01 1.338727951049804688e+01
8.556406974792480469e+00 1.343830871582031250e+01
6.953704357147216797e+00 1.346025466918945312e+01
5.448281288146972656e+00 1.340069961547851562e+01
3.750601768493652344e+00 1.338894081115722656e+01
2.197587871551513672e+00 1.309178924560546875e+01
1.648979549407958984e+00 1.113714027404785156e+01
1.638838768005371094e+00 8.914575576782226562e+00
1.582886219024658203e+00 6.895450115203857422e+00
1.609868049621582031e+00 5.023091793060302734e+00
1.697061538696289062e+00 2.892292022705078125e+00
2.775404453277587891e+00 1.849611759185791016e+00
1.2.2 拟合路点得到机器人要跟踪的路线
import numpy as np
from scipy.interpolate import interp1d
wps = np.loadtxt("wps.txt")
x = wps[:,0]
y = wps[:,1]
t = np.linspace(0, 1, num=len(x))
f1 = interp1d(t,x,kind='cubic')
f2 = interp1d(t,y,kind='cubic')
newt = np.linspace(0,1,100)
newx = f1(newt)
newy = f2(newt)
import matplotlib.pyplot as plt
%matplotlib inline
plt.scatter(x, y)
plt.plot(newx, newy)
plt.show()
2. Turtlebot的MPC轨迹跟踪问题
与无人车不同,Turtlebot是基于左右轮差速来达到转弯,前行运动的。ROS中的Turtlebot包中的控制项有线速度v 与角速度w 。Turtlebot的运动学模型如下:

首先我们需要将以上连续的微分模型离散化成差分模型(差分间隔为d t)

其中,cte \text{cte}cte与epsi \text{epsi}epsi的计算法公式详见无人车系统(十一):轨迹跟踪模型预测控制(MPC)原理与python实现【40行代码】。
对于一个预测步长为N NN的MPC控制器求解问题,可以设计以下优化目标函数:

满足动态模型约束:

执行器约束:

3. 程序与运行结果

import rospy
import copy
import tf
import numpy as np
from scipy import spatial
from geometry_msgs.msg import PointStamped
from geometry_msgs.msg import PoseStamped
from nav_msgs.msg import Odometry
from nav_msgs.msg import Path
from geometry_msgs.msg import Twist
from pyomo.environ import *
from pyomo.dae import *
from scipy.interpolate import interp1d
import matplotlib
import matplotlib.pyplot as plt
%matplotlib inline
# set up matplotlib
is_ipython = 'inline' in matplotlib.get_backend()
if is_ipython:
from IPython import display
plt.ion()
wps = np.loadtxt("wps.txt")
x = wps[:,0]
y = wps[:,1]
t = np.linspace(0, 1, num=len(x))
f1 = interp1d(t,x,kind='cubic')
f2 = interp1d(t,y,kind='cubic')
newt = np.linspace(0,1,100)
nwps = np.zeros((100, 2))
nwps[:,0] = f1(newt)
nwps[:,1] = f2(newt)
wpstree = spatial.KDTree(nwps)
def getcwps(rp):
_, nindex = wpstree.query(rp)
cwps = np.zeros((5,2))
for i in range(5):
cwps[i] = nwps[(nindex+i)%len(nwps)]
# if (nindex + 5) >= 100:
# cwps[0:100-nindex-1] = nwps[nindex:-1]
# cwps[100-nindex-1:-1] = nwps[0:nindex+5-100]
# else:
# cwps = nwps[nindex:nindex+5]
return cwps
def cubic_fun(coeffs, x):
return coeffs[0]*x**3+coeffs[1]*x**2+coeffs[2]*x+coeffs[3]
def plot_durations(cwps, prex, prey):
plt.figure(2)
plt.clf()
plt.plot(cwps[:,0],cwps[:,1])
plt.plot(prex, prey)
plt.scatter(x, y)
if is_ipython:
display.clear_output(wait=True)
display.display(plt.gcf())
N = 19 # forward predict steps
ns = 5 # state numbers / here: 1: x, 2: y, 3: psi, 4: cte, 5: epsi
na = 2 # actuator numbers /here: 1: steering angle, 2: omega
class MPC(object):
def __init__(self):
m = ConcreteModel()
m.sk = RangeSet(0, N-1)
m.uk = RangeSet(0, N-2)
m.uk1 = RangeSet(0, N-3)
m.wg = Param(RangeSet(0, 3), initialize={0:1., 1:10., 2:100., 3:1000}, mutable=True)
m.dt = Param(initialize=0.1, mutable=True)
m.ref_v = Param(initialize=0.5, mutable=True)
m.ref_cte = Param(initialize=0.0, mutable=True)
m.ref_epsi = Param(initialize=0.0, mutable=True)
m.s0 = Param(RangeSet(0, ns-1), initialize={0:0., 1:0., 2:0., 3:0., 4:0.}, mutable=True)
m.coeffs = Param(RangeSet(0, 3),
initialize={0:-0.000458316, 1:0.00734257, 2:0.0538795, 3:0.080728}, mutable=True)
m.s = Var(RangeSet(0, ns-1), m.sk)
m.f = Var(m.sk)
m.psides = Var(m.sk)
m.uv = Var(m.uk, bounds=(-0.01, 2.0))
m.uw = Var(m.uk, bounds=(-1.5, 1.5))
# 0: x, 1: y, 2: psi, 3: cte, 4: epsi
m.s0_update = Constraint(RangeSet(0, ns-1), rule = lambda m, i: m.s[i,0] == m.s0[i])
m.x_update = Constraint(m.sk, rule=lambda m, k:
m.s[0,k+1]==m.s[0,k]+m.uv[k]*cos(m.s[2,k])*m.dt
if k<N-1 else Constraint.Skip)
m.y_update = Constraint(m.sk, rule=lambda m, k:
m.s[1,k+1]==m.s[1,k]+m.uv[k]*sin(m.s[2,k])*m.dt
if k<N-1 else Constraint.Skip)
m.psi_update = Constraint(m.sk, rule=lambda m, k:
m.s[2,k+1]==m.s[2,k]+ m.uw[k]*m.dt
if k<N-1 else Constraint.Skip)
m.f_update = Constraint(m.sk, rule=lambda m, k:
m.f[k]==m.coeffs[0]*m.s[0,k]**3+m.coeffs[1]*m.s[0,k]**2+
m.coeffs[2]*m.s[0,k]+m.coeffs[3])
m.psides_update = Constraint(m.sk, rule=lambda m, k:
m.psides[k]==atan(3*m.coeffs[0]*m.s[0,k]**2
+2*m.coeffs[1]*m.s[0,k]+m.coeffs[2]))
m.cte_update = Constraint(m.sk, rule=lambda m, k:
m.s[3,k+1]==(m.f[k]-m.s[1,k]+m.uv[k]*sin(m.s[2,k])*m.dt)
if k<N-1 else Constraint.Skip)
m.epsi_update = Constraint(m.sk, rule=lambda m, k:
m.s[4, k+1]==m.psides[k]-m.s[2,k]+m.uw[k]*m.dt
if k<N-1 else Constraint.Skip)
m.cteobj = m.wg[3]*sum((m.s[3,k]-m.ref_cte)**2 for k in m.sk)
m.epsiobj = m.wg[3]*sum((m.s[4,k]-m.ref_epsi)**2 for k in m.sk)
m.vobj = m.wg[2]*sum((m.uv[k]-0.5)**2 for k in m.uk)
m.uvobj = m.wg[1]*sum(m.uv[k]**2 for k in m.uk)
m.uwobj = m.wg[1]*sum(m.uw[k]**2 for k in m.uk)
m.sudobj = m.wg[0]*sum((m.uv[k+1]-m.uv[k])**2 for k in m.uk1)
m.suaobj = m.wg[0]*sum((m.uw[k+1]-m.uw[k])**2 for k in m.uk1)
m.obj = Objective(expr = m.cteobj+m.epsiobj+m.vobj+m.uvobj+m.uwobj+m.sudobj+m.suaobj, sense=minimize)
self.iN = m#.create_instance()
def Solve(self, state, coeffs):
self.iN.s0.reconstruct({0:state[0], 1: state[1], 2:state[2], 3:state[3], 4:state[4]})
self.iN.coeffs.reconstruct({0:coeffs[0], 1:coeffs[1], 2:coeffs[2], 3:coeffs[3]})
self.iN.f_update.reconstruct()
self.iN.s0_update.reconstruct()
self.iN.psides_update.reconstruct()
SolverFactory('ipopt').solve(self.iN)
x_pred_vals = [self.iN.s[0,k]() for k in self.iN.sk]
y_pred_vals = [self.iN.s[1,k]() for k in self.iN.sk]
pre_path = np.zeros((N,2))
pre_path[:,0] = np.array(x_pred_vals)
pre_path[:,1] = np.array(y_pred_vals)
v = self.iN.uv[0]()
w = self.iN.uw[0]()
return pre_path, v, w
class Turtlebot_core():
def __init__(self):
rospy.init_node("Turtlebot_core", anonymous=True)
self.listener = tf.TransformListener()
rospy.Subscriber("/odom", Odometry, self.odomCallback)
self.pub_refpath = rospy.Publisher("/ref_path", Path, queue_size=1)
self.pub_prepath = rospy.Publisher("/pre_path", Path, queue_size=1)
self.pub_cmd = rospy.Publisher("/cmd_vel_mux/input/teleop", Twist, queue_size=1)
self.rp = np.zeros(3)
self.crv = 0.0
self.crw = 0.0
self.mpc = MPC()
rate = rospy.Rate(10) # 10HZ
while not rospy.is_shutdown():
self.getrobotpose()
cwps = getcwps(self.rp[0:2])
px = self.rp[0] + self.crv*np.cos(self.rp[2])*0.1
py = self.rp[1] + self.crw*np.sin(self.rp[2])*0.1
psi = self.rp[2] + self.crw*0.1
self.rp[0] = px
self.rp[1] = py
self.rp[2] = psi
cwps_robot = np.zeros((len(cwps), 2))
for i in range(len(cwps)):
dx = cwps[i,0] - px
dy = cwps[i,1] - py
cwps_robot[i,0] = dx*np.cos(psi) + dy*np.sin(psi)
cwps_robot[i,1] = dy*np.cos(psi) - dx*np.sin(psi)
coeffs = np.polyfit(cwps_robot[:,0], cwps_robot[:,1], 3)
cte = cubic_fun(coeffs, 0)
f_prime_x = coeffs[2]
epsi = np.arctan(f_prime_x)
s0 = np.array([0.0, 0.0, 0.0, cte, epsi])
pre_path, v, w = self.mpc.Solve(s0, coeffs)
self.pub_ref_path(cwps_robot)
self.pub_pre_path(pre_path)
self.pub_Command(v, w)
print(v,w)
# plot_durations(cwps, x_pred_vals, y_pred_vals)
rate.sleep()
rospy.spin()
def getrobotpose(self):
try:
(trans,rot) = self.listener.lookupTransform('/map', '/base_link', rospy.Time(0))
except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException):
return
self.rp[0] = trans[0]
self.rp[1] = trans[1]
r,p,y = tf.transformations.euler_from_quaternion(rot)
self.rp[2] = y
def odomCallback(self, data):
self.crv = data.twist.twist.linear.x
self.crw = data.twist.twist.angular.z
def pub_ref_path(self, ref_path):
msg_ref_path = Path()
msg_ref_path.header.stamp = rospy.Time.now()
msg_ref_path.header.frame_id = "base_link"
for i in range(len(ref_path)):
pose = PoseStamped()
pose.pose.position.x = ref_path[i,0]
pose.pose.position.y = ref_path[i,1]
msg_ref_path.poses.append(copy.deepcopy(pose))
self.pub_refpath.publish(msg_ref_path)
def pub_pre_path(self, pre_path):
msg_pre_path = Path()
msg_pre_path.header.stamp = rospy.Time.now()
msg_pre_path.header.frame_id = "base_link"
for i in range(len(pre_path)):
pose = PoseStamped()
pose.pose.position.x = pre_path[i,0]
pose.pose.position.y = pre_path[i,1]
msg_pre_path.poses.append(copy.deepcopy(pose))
self.pub_prepath.publish(msg_pre_path)
def pub_Command(self, v, w):
twist = Twist()
twist.linear.x = v
twist.angular.z = w
self.pub_cmd.publish(twist)
if __name__ == "__main__":
turtlebot_core = Turtlebot_core()
结果如下图所示(绿线为预测的轨迹,红线为turtlebot要跟踪的轨迹):
4. 写在后面
基于MPC的轨迹跟踪方法的效果与所设定的目标函数、目标函数的参数有很大的关系。本文最后的参数都是通过不断的试验得到的,最终turtlebot能够在回形走廊环境中跟踪上要跟踪的轨迹。
by Toby 2020-2-2
愿疫情早点结束!




