描述ROS系统下,使用moveit和gazebo搭建UR机械臂控制的仿真环境,并使用C++编写一个节点来控制UR机械臂的移动ROS系统:kineticUR5机械臂电脑系统:Ubuntu16.04截……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3655浏览 0评论1903个赞
文章目录A 路径规划定义B 构型/位型空间(configuration Space)C 障碍物与构型空间C 环境模型建立D 欧氏距离与曼哈顿……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1717浏览 0评论1581个赞
描述机械臂末端的位姿是p时,不想沿着基坐标系来移动,而是想沿着末端的xyz轴来移动接口代码核心函数# 移动def move_……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2252浏览 0评论264个赞
Dijkstra算法Dijkstra算法是从一个节点到区域各节点的最短路径算法,解决的是最短路径问题。特点:以起点为中心,向外层层扩展,直到扩展到终点为止。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1856浏览 0评论2468个赞
Aster(A*)算法Aster算法是在Dijkstra算法基础上发展出来的,是在静态路径中用于求解最优路径有效的直接搜索算法,比dijkstra算法多了一个启发式的搜索函数,也就是通过一个代价函数来确定搜索方向(从起点开始向周围扩张,通过代价函数,计……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1955浏览 0评论1369个赞
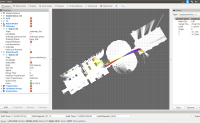
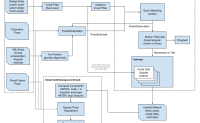
本人为了对比研究三大经典SLAM算法(Gmapping、Cartographer、Hector)的优缺因此考虑在Turtlebot3仿真环境下对这三个SLAM算法进行测试。没想到测试第一个算法(Google的cartographer)就花……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1880浏览 0评论1017个赞
一、前言该篇为本文的重点,主要内容为cartographer_turtlrbot3源码库的安装二、cartographer_turtlebot源码库安装这里基本参考创客智造的安装教程,但是由于教……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2958浏览 0评论2901个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3536浏览 0评论1579个赞
文章目录1、MOVO安装教程MOVO开发硬件需求软件安装连接到MOVO平台2、MOVO机器人……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3057浏览 0评论2945个赞