之前写的文章分析了全向小车运动原理和基本构型,今天尝试把它部署到 Ros 上。
基本原理
参考系的定义需要根据 Ros by Example chapter 7 做一些修改:
-- 全向移动机器人Modeling and Control")
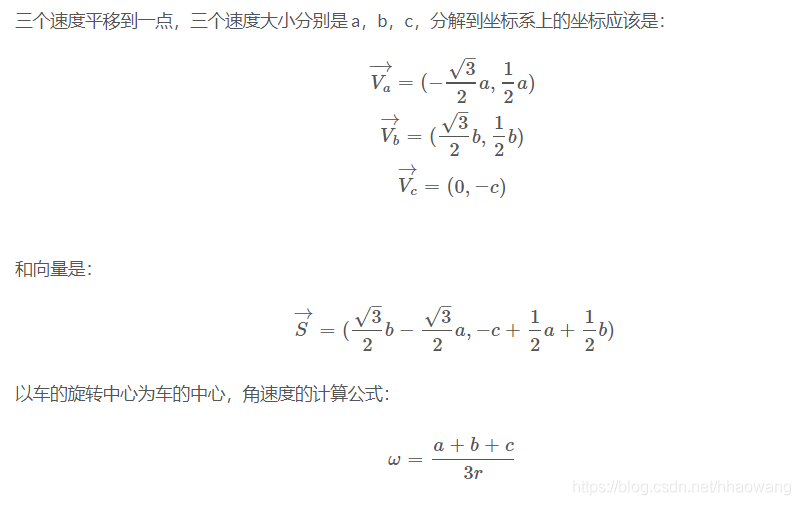
- 定义三轮车的三个轮子分别是 A、B、C, 速度分别是a、b、c;
- 定义半径 Radius 是中点到轮子的距离;
- 定义 a,b 为前轮,c 为后轮。
-- 全向移动机器人Modeling and Control")
控制程序
Ros 中的的速度消息是 Twist 指定的
$ rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 zlinear 中的 x 代表前进的速度,单位是 m/s 。angular 中的 z 表示角速度,单位 rad/s。
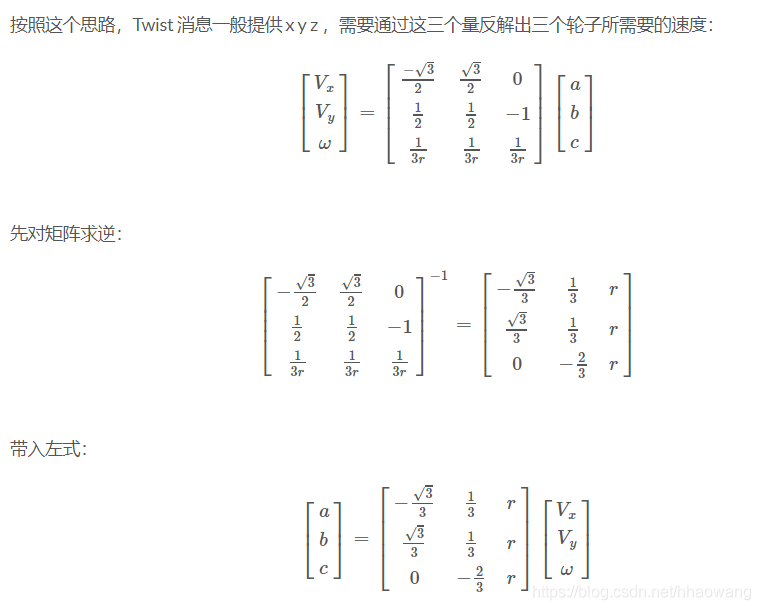
python 实现,由于小车控制器和电机自带PID控制,只需写一个发布速度的节点:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from geometry_msgs.msg import Twist
from math import sqrt
import RPi.GPIO as GPIO
import time
import sys
Radius = 10 #圆盘半径,需要根据情况修改
PWMA = 18
AIN1 = 22
AIN2 = 27
PWMB = 23
BIN1 = 25
BIN2 = 24
PWMC = 16
CIN1 = 20
CIN2 = 21
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
GPIO.setup(AIN2,GPIO.OUT)
GPIO.setup(AIN1,GPIO.OUT)
GPIO.setup(PWMA,GPIO.OUT)
GPIO.setup(BIN1,GPIO.OUT)
GPIO.setup(BIN2,GPIO.OUT)
GPIO.setup(PWMB,GPIO.OUT)
GPIO.setup(CIN1,GPIO.OUT)
GPIO.setup(CIN2,GPIO.OUT)
GPIO.setup(PWMC,GPIO.OUT)
A_Motor= GPIO.PWM(PWMA,100)
A_Motor.start(0)
B_Motor = GPIO.PWM(PWMB,100)
B_Motor.start(0)
C_Motor = GPIO.PWM(PWMC,100)
C_Motor.start(0)
def compute(Vx,Vy,omega):
a = -sqrt(3)/3 * Vx + 1/3 * Vy + omega * Radius
b = sqrt(3)/3 * Vx + 1/3 * Vy + omega * Radius
c = - 2/3 * Vy + omega * Radius
return a,b,c
def move(va,vb,vc,t_time = 4):
A_Motor.ChangeDutyCycle(abs(va))
GPIO.output(AIN1,bool(va<0))
GPIO.output(AIN2,bool(va>0))
B_Motor.ChangeDutyCycle(abs(vb))
GPIO.output(BIN1,bool(vb<0))
GPIO.output(BIN2,bool(vb>0))
C_Motor.ChangeDutyCycle(abs(vc))
GPIO.output(CIN1,bool(vc<0))
GPIO.output(CIN2,bool(vc>0))
time.sleep(t_time)
def callback(msg):
rospy.loginfo("Received a /cmd_vel message!")
rospy.loginfo("Linear Velocity: [%f, %f, %f]"%(msg.linear.x, msg.linear.y, msg.linear.z))
rospy.loginfo("Angular Velocity: [%f, %f, %f]"%(msg.angular.x, msg.angular.y, msg.angular.z))
# 速度获取
omega = msg.angular.z #角速度
Vx = msg.linear.x
Vy = msg.linear.y
va,vb,vc = compute(Vx, Vy, omega)
rospy.loginfo("va: %f, vb: %f, vc: %f]"%(va, vb, vc))
move(va,vb,vc)
def listener():
rospy.init_node('vel_listener')
rospy.Subscriber('/cmd_vel', Twist, callback)
rospy.spin()
if __name__ == "__main__":
try:
listener()
except KeyboardInterrupt:
GPIO.cleanup()



