一、什么是决策树 本章着重对算法部分进行讲解,原理部分不过多叙述,有兴趣的小伙伴可以自行查阅其他文献/文章 决策树(decision t……继续阅读 » 5年前 (2021-04-26) 2552浏览 0评论2866个赞
一、什么是svm 支持向量机(Support Vector Machine, SVM)是一类按监督学习(supervised learning)方式对数据进行二元分类的广义线性分类器(generalized linear class……继续阅读 » 5年前 (2021-04-26) 2787浏览 0评论2290个赞
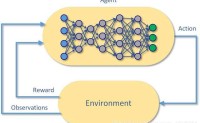
一、什么是神经网络 神经网络是一种以人脑为模型的机器学习,简单地说就是创造一个人工神经网络,通过一种算法允许计算机通过合并新的数据来学习。 以人脑中的神经网络为启发,历史上出现过很多不同版本最著名的算法是1980年的 backpropagation……继续阅读 » 5年前 (2021-04-26) 3200浏览 0评论2292个赞
数据集介绍 使用Fashion MNIST数据集,其中包含10个类别的70,000个灰度图像。图像显示了低分辨率(28 x 28像素)的单个衣物,如下所示(图片来自tensorflow官方文档): ……继续阅读 » 5年前 (2021-04-26) 1528浏览 0评论687个赞
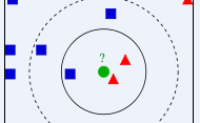
一、什么是knn算法 本章着重对算法部分进行讲解,原理部分不过多叙述,有兴趣的小伙伴可以自行查阅其他文献/文章 (一)、介绍<……继续阅读 » 5年前 (2021-04-26) 2672浏览 0评论721个赞
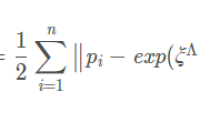
本文将会讨论策略优化的数学基础,并且会附上简单的实践代码。三个要点 一个简单的等式,将策略梯度跟策略模型参数连接起来一条规则,允许我们将无用的项从等式里去掉另一条规则,允许我们在等式中添加有用的项……继续阅读 » 5年前 (2021-04-26) 2309浏览 0评论2344个赞
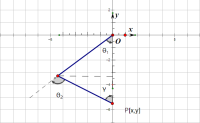
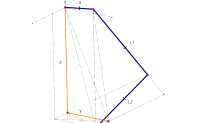
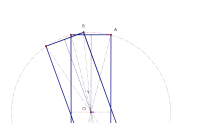
不考虑横向运动时,我们可以把四足机器人的腿部简单看成一个二连杆结构,这节我们就来讲解如何调整离地高度的问题 一、几何模型 我们可以把机器人的一条腿简化成以下形状,由两根连杆组成,……继续阅读 » 5年前 (2021-04-26) 2701浏览 0评论1954个赞
文章目录 一、准备工作1、pybullet2、mini cheetah 的模型……继续阅读 » 5年前 (2021-04-26) 2136浏览 0评论2529个赞
在本教程中,我们将通过模拟控制器来驱动机器人的关节。这将使我们能够为MoveIt等规划器提供正确的ROS接口!。我们将使用ros_control软件包。 与ros……继续阅读 » 5年前 (2021-04-26) 3966浏览 0评论500个赞
gazebo一、什么是Gazebo?Gazebo的典型用途Gazebo的一些主要特点……继续阅读 » 5年前 (2021-04-26) 2811浏览 0评论1819个赞
创建模型 本节目标一、模型编辑器用户界面调色板(左面板)工具……继续阅读 » 5年前 (2021-04-26) 2505浏览 0评论1183个赞
文章目录Step 1 建立基本的sdf模型1、创建新的.world文件2、添加地面和光线……继续阅读 » 5年前 (2021-04-26) 2245浏览 0评论823个赞
文章目录一、介绍二、准备网格模型三、将网格模型添加到sdf文件中 ……继续阅读 » 5年前 (2021-04-26) 2993浏览 0评论626个赞
文章目录 传感器噪音Step1 可视化传感器数据Step2 添加噪声一、介绍……继续阅读 » 5年前 (2021-04-26) 2808浏览 0评论1640个赞
插件配置一、准备工作二、创建一个API三、测试消息传递API……继续阅读 » 5年前 (2021-04-26) 1876浏览 0评论2327个赞
连接ros添加ROS插件在ROS中控制Velodyne 在之前的文章中,我们构建的Velodyne传感器已经具……继续阅读 » 5年前 (2021-04-26) 3120浏览 0评论2302个赞
场景建模 一、介绍 1、打开场景编辑器 UI介绍 二、导入平面图 三、添加特征 墙壁……继续阅读 » 5年前 (2021-04-26) 3284浏览 0评论2341个赞
获取RRbot模型 1、获取RRbot模型2、在rviz中查看……继续阅读 » 5年前 (2021-04-26) 1542浏览 0评论2396个赞
文章目录 一、算法简介1、关键点……继续阅读 » 5年前 (2021-04-26) 3586浏览 0评论378个赞
文章目录 一、PPO主体1、主结构……继续阅读 » 5年前 (2021-04-26) 2725浏览 0评论2961个赞
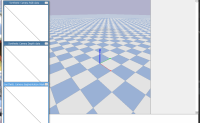
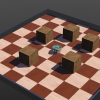
本篇将会创建几个基本的仿真环境,包含了一些必要的功能函数,实现动态调整离地高度。能够与决策模型进行交互,为后续强化学习训练做准备 文章目录 一、框架……继续阅读 » 5年前 (2021-04-26) 3440浏览 0评论1636个赞
不考虑横向运动时,我们可以把四足机器人的腿部简单看成一个二连杆结构,这节我们就来讲解如何调整离地高度的问题 一、几何模型 我们可以把机器人的一条腿简化成以下形状,由两根连杆组成,……继续阅读 » 5年前 (2021-04-26) 3539浏览 0评论831个赞
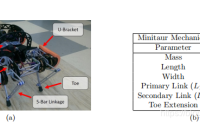
一、minitaur 简介 这是来自宾夕法尼亚大学的一款机器人,叫 Minitaur,看图你就明白了。 ……继续阅读 » 5年前 (2021-04-26) 3344浏览 0评论206个赞
文章目录 模型概要1、状态、决策空间(略)2、奖励函数3……继续阅读 » 5年前 (2021-04-26) 3406浏览 0评论1835个赞
文章目录 1、现实差2、 提高仿真度前提2.1、执行器模型< ……继续阅读 » 5年前 (2021-04-26) 2773浏览 0评论1788个赞
一、复合摆线轨迹 在四足机器人的研究中,有一个很关键的问题,就是如何减少足端在触地瞬间的冲击,避免把机器人把自己给蹬倒了?这时候就需要一……继续阅读 » 5年前 (2021-04-26) 1841浏览 0评论2436个赞
文章目录 介绍minitaur urdf解析base_chassis_linkchas……继续阅读 » 5年前 (2021-04-26) 2366浏览 0评论1976个赞
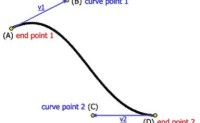
本篇将讲解MiniCheetah中所使用的的足端轨迹方程-贝塞尔曲线方程 一、贝塞尔曲线 贝塞尔曲线就是这样的一条曲线,它是依据四个位置任意的点坐标绘制出的一条光滑……继续阅读 » 5年前 (2021-04-26) 2541浏览 0评论1030个赞
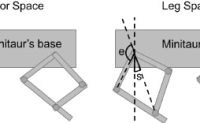
文章目录 一、结构参数二、腿部运动空间 随着人类环境中对机器人交互的需求不断增长,动态四足机器人的……继续阅读 » 5年前 (2021-04-26) 1649浏览 0评论1754个赞
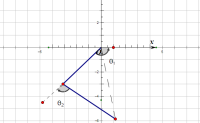
本篇将会对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 一、运动学 不考虑横向髋关节运动时,四足机器人的腿……继续阅读 » 5年前 (2021-04-26) 3548浏览 0评论638个赞
本篇将会对四足机器人的俯仰角进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 一、数学建模 ……继续阅读 » 5年前 (2021-04-26) 2433浏览 0评论2437个赞
本篇将会三维空间中,对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 首先,我们来看三维空间中简图: ……继续阅读 » 5年前 (2021-04-26) 2759浏览 0评论782个赞
从正面观看我们的四足机器人时,可以简化成以下几何图形,接下来我们就根据该模型来分析四足机器人的滚转角调节 一、几何模型 ……继续阅读 » 5年前 (2021-04-26) 2932浏览 0评论1402个赞
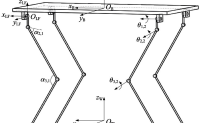
从正上方观看我们的四足机器人时,可以简化成以下几何图形,接下来我们就根据该模型来分析四足机器人的偏航调节 一、几何模型 以右前腿为例 ……继续阅读 » 5年前 (2021-04-26) 1894浏览 0评论2538个赞
一、平面运动学建模 本篇将会对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 不考虑横向髋关节运动时,四足机器人的腿部可以简化成二连杆机构 1、几何建模……继续阅读 » 5年前 (2021-04-26) 2050浏览 0评论2532个赞
根据零力矩点理论分析机器人行进过程的稳定条件,利用稳定裕度的概念,在支撑多边形中求取最优稳定点来规划零力矩点.可以为避免 walk步态中频繁调整躯干姿态导致的能耗和行进速度损失[1] 此外,“零力矩点”是判定仿人机器人动态稳定运动的……继续阅读 » 5年前 (2021-04-26) 2709浏览 0评论2707个赞
时间:2020年4月9日 对之前内容做补充,加入支撑相轨迹规划,并构造完整的的周期曲线 在四足机器人的研究中,有一个很关键的问题,就是如何减少足端在触地瞬间的冲击,避免把机器人把自己给蹬倒了?这时候就需要一个合……继续阅读 » 5年前 (2021-04-26) 2960浏览 0评论1522个赞
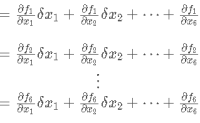
一、引入 假设有6个函数,每个函数有6个独立的变量,即: ……继续阅读 » 5年前 (2021-04-26) 2437浏览 0评论282个赞
一、创建一个新的World 一个World是包含像对象是一个信息的文件,比如他们的样式,它们如何相互约束,天空是怎样的,重力是多少,摩擦力,物体的质量等。不同的对象称为“ 节点”,并在“ 场景树”中进行分层组织。因此,一个节点可能包含子节点。Wor……继续阅读 » 5年前 (2021-04-26) 3326浏览 0评论1928个赞
介绍 现在,我们将编程一个简单的控制器,该控制器将使机器人向前移动。 ……继续阅读 » 5年前 (2021-04-26) 1953浏览 0评论146个赞
前言 现在我们开始解决与编程机器人控制器有关的主题。我们将设计一个简单的控制器,避免前面教……继续阅读 » 5年前 (2021-04-26) 3445浏览 0评论1788个赞
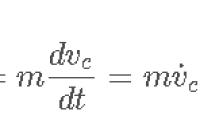
一、MPC的力学原理 刚体的力与加速度,转矩与角加速度可以通过牛顿方程和欧拉方程求出: ……继续阅读 » 5年前 (2021-04-26) 2161浏览 0评论817个赞
前言在四足机器人的研究中,有一个很关键的问题,就是如何减少足端在触地瞬间的冲击,避免把机器人把自……继续阅读 » 5年前 (2021-04-26) 2783浏览 0评论2218个赞