本篇将会创建几个基本的仿真环境,包含了一些必要的功能函数,实现动态调整离地高度。能够与决策模型进行交互,为后续强化学习训练做准备
文章目录
- 一、框架
-
- 1、`__init__`
- 2、`reset`
- 3、`step`
- 4、`reset_pos`
- 5、执行
一、框架
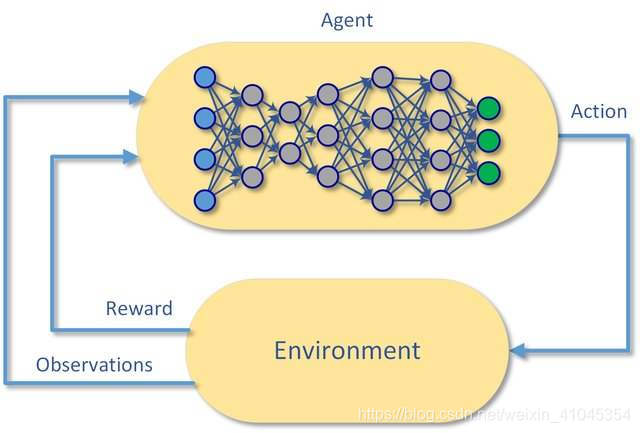 按照强化学习的基本思路,我们需要构建仿真环境与代理进行交互的部分。每一个循环需要执行以下步骤:
按照强化学习的基本思路,我们需要构建仿真环境与代理进行交互的部分。每一个循环需要执行以下步骤:
- 初始化环境:包括导入相关模型,设置好动力学参数之类的
- 执行动作:根据agent产生的动作来使模型运动
- 返回状态和奖励:执行完动作之后,重新获取当前状态并计算奖励值,返回给agent
因此,我们的环境框架需要包含一下功能:
class Cheetah(object):
def __init__(self):
'''
初始化参数
'''
pass
def reset(self):
'''
环境复位
'''
pass
def step(self):
'''
执行动作
'''
pass
def get_observe(self):
'''
获取当前状态
'''
pass
def reward(self):
'''
计算奖励值
'''
pass这里我们先不考虑强化学习部分,因此可以暂时忽略奖励函数部分
1、__init__
这里我们需要初始化以下内容:
- pybullet客户端:pybullet的使用标准
- motor_id:用于设置电机角度,需要区分各个关节类型,这里为了方便直接给出了对应的编号。
- 设置重力
- 设置参数:
addUserDebugParameter这个api提供用户自定义的参数,我这里设置成 髋关节角度 - 设置视角:
resetDebugVisualizerCamera这个api可以设置相机姿态,在我的pybulet实践文章中已经介绍过其使用
当我们的类初始化的时候需要调用一次reset()函数来设置mini cheetah的姿态
def __init__(self):
# self.pybullet_client = self._pybullet_client = bc.BulletClient(connection_mode=pybullet.GUI)
self.pybullet_client = pybullet
self.pybullet_client.connect(self.pybullet_client.GUI)
self.pybullet_client.setAdditionalSearchPath(pybullet_data.getDataPath())
self.motor_id_list = [0, 1, 2, 4, 5, 6, 8, 9, 10, 12, 13, 14]
self.pybullet_client.setGravity(0, 0, -9.8)
# self.upper_angle = self.pybullet_client.addUserDebugParameter("upper_angle", 0, 1, 0.4)
self.pybullet_client.resetDebugVisualizerCamera(0.2, 45, -30, [1, -1, 1])
self.reset()
2、reset
- 导入地面
- 导入mini_cheetah模型
- 打印关节信息:
getNumJoints用于获取关节信息 - 调用
reset_pos()函数来设置每一条腿姿态
def reset(self):
init_position = [0, 0, 0.5]
self._ground_id = self.pybullet_client.loadURDF('plane.urdf')
self.quadruped = self.pybullet_client.loadURDF(
"mini_cheetah/mini_cheetah.urdf",
init_position,
useFixedBase=False)
num_joints = self.pybullet_client.getNumJoints(self.quadruped)
for i in range(num_joints):
print(self.pybullet_client.getJointInfo(self.quadruped, i))
for i in range(4):
self.reset_pos(i, 0.7853982)
3、step
由于这里只是演示,所以没有采用更高级的动作指令,这里实现的功能是根据时间动态调整mini_cheetah的离地高度(sin函数)。 readUserDebugParameter这个api适用于读取用户自定的参数的,在__init__函数中已经初始化过了,我们可以通过滑块来调整离地高度,注意不能喝sin函数同时使用。
def step(self):
t = 0
while 1:
t += 0.001
angle = 0.4 * np.sin(t) + 0.5
# angle = self.pybullet_client.readUserDebugParameter(self.upper_angle)
for i in range(4):
self.reset_pos(i, angle)
self.pybullet_client.stepSimulation()
4、reset_pos
设置腿部姿态,setJointMotorControl2这个api是pybullet中最为常用的,因为控制关节都是通过这个api进行的。这里利用该api分别对髋关节和膝关节进行角度控制。
def reset_pos(self, leg_id, angle):
l1 = 208
l2 = 180
hip_angle = 0.0
upper_angle = -angle
# 离地高度L与髋关节角度alpha的关系,在数学问题-初始姿态这篇文章介绍过该公式
L = l1 * np.cos(angle) + np.sqrt(-l1 ** 2 * np.sin(angle) ** 2 + l2 ** 2)
gamma = np.arccos((-l1 ** 2 + L ** 2 + l2 ** 2) / (2 * L * l2))
beta = angle + gamma
self.pybullet_client.setJointMotorControl2(self.quadruped,
jointIndex=self.motor_id_list[3 * leg_id],
controlMode=self.pybullet_client.POSITION_CONTROL,
targetPosition=hip_angle)
self.pybullet_client.setJointMotorControl2(self.quadruped,
self.motor_id_list[3 * leg_id + 1],
self.pybullet_client.POSITION_CONTROL,
targetPosition=upper_angle)
self.pybullet_client.setJointMotorControl2(self.quadruped,
self.motor_id_list[3 * leg_id + 2],
self.pybullet_client.POSITION_CONTROL,
targetPosition=beta)
5、执行
if __name__ == '__main__':
env = Cheetah()
env.step() 现在我们执行程序看效果如何:
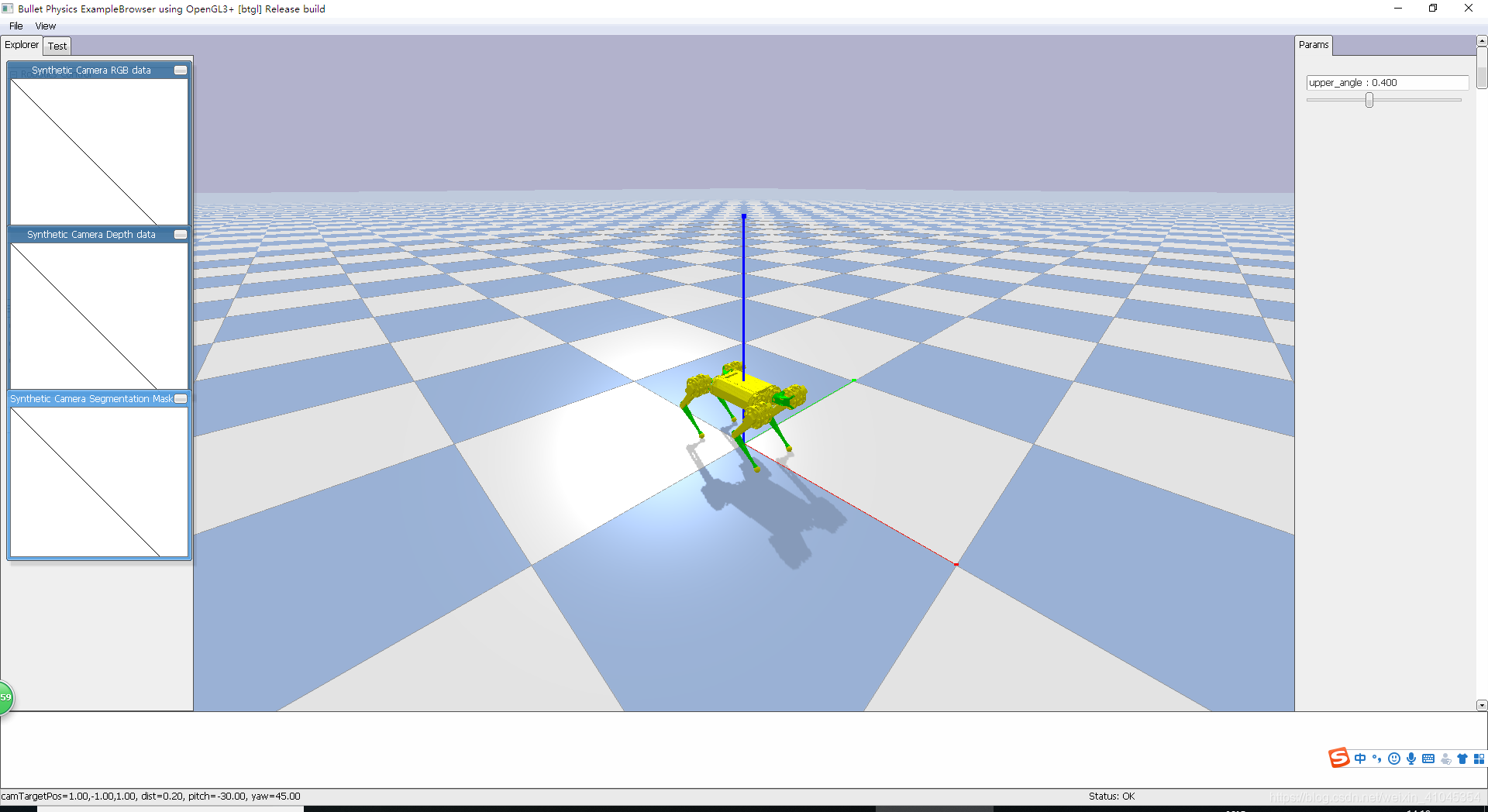 动态效果:
动态效果:
框架搭建")