一、引入
假设有6个函数,每个函数有6个独立的变量,即:
y1=f1(x1,x2,x3,x4,x5,x6) y2=f2(x1,x2,x3,x4,x5,x6) ⋮ y6=f6(x1,x2,x3,x4,x5,x6) 我们用矢量形式表达上式,即: Y=F(X) 现在,如果我们要计算yi的微分关于xi的微分的函数,通过多元函数求导法则,可以计算出:  同样,我们以矢量形式表示:
同样,我们以矢量形式表示:  式(1)中的
式(1)中的![]() 偏导数矩阵。它,就是我们所说的雅克比矩阵J
偏导数矩阵。它,就是我们所说的雅克比矩阵J
速度映射
如果f1(X)到f6(X)都是非线性函数,那么,这些偏导数都是关于xi的函数,我们可以用以下式子表达: δY=J(X)δX(2) 式(2)两边同时除以时间微分dt,我们就可以将雅克比矩阵看作是X 中的速度映射为Y 中的速度: 
在任一瞬间,X都有一个确定的值,J(X)是个线性变换,在每一新时刻,如果X发生改变,J(X)也会发生改变
在机器人学中,通常使用雅克比将关节速度与操作臂末端的速度联系起来: ![]() 其中,Θ为关节角组成的向量,v 为速度向量。对于6关节机械臂,雅克比矩阵为
其中,Θ为关节角组成的向量,v 为速度向量。对于6关节机械臂,雅克比矩阵为![]() 而v 是由一个3×1的线速度和一个3×1的角速度所组成,表达为:
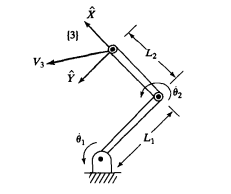
而v 是由一个3×1的线速度和一个3×1的角速度所组成,表达为:  对于两连杆机构,如下图,我们很容易写出它的关节速度(世界坐标系下)与执行器末端速度的关系:
对于两连杆机构,如下图,我们很容易写出它的关节速度(世界坐标系下)与执行器末端速度的关系:  以及相对于执行器末端的速度:
以及相对于执行器末端的速度:  因此,我们能够算出世界坐标系的雅克比矩阵为:
因此,我们能够算出世界坐标系的雅克比矩阵为:  末端执行器坐标系下的雅克比:
末端执行器坐标系下的雅克比: