文章目录
- 一、结构参数
- 二、腿部运动空间
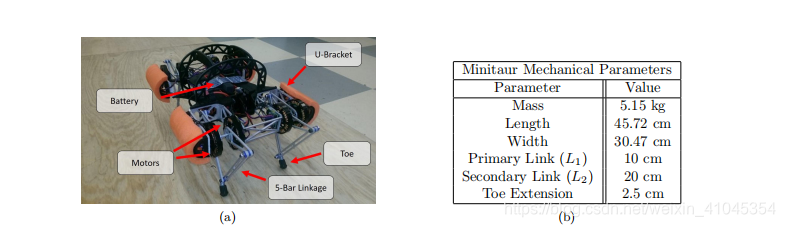
随着人类环境中对机器人交互的需求不断增长,动态四足机器人的发展正成为人们越来越感兴趣的话题,但是它们需要自适应的控制方案来应对穿越现实世界地形时遇到的挑战。 在这项研究中,我们探索了对四足系统的物理和控制方法的改进,以实现快速,稳定的步行和小跑步态。该分析包括对身体柔韧性的研究,用于轨迹成形的5杆运动学以及地面和障碍物接触感测的实现。进行了结构和机械方面的改进,以减少不必要的柔韧性,从而产生更快,更稳定的步态。实施了接触感测,以识别障碍物和地面高度偏差,以协商变化的地形。总体而言,这些功能的结合大大增强了动态四足机器人的机动性,并有助于建立克服障碍的基础。 Minitaur是动态四足动物,其腿部采用直接驱动5杆机构设计。这种设计涉及两个电动机的同轴 定位,这些电动机之间的间距要足够宽,足以容纳腿的各个部分并允许较大范围的运动。
论文作者:Daniel J. Blackman, John V. Nicholson, Camilo Ordonez, Bruce D.Miller, and Jonathan E. Clark
一、结构参数
二、腿部运动空间
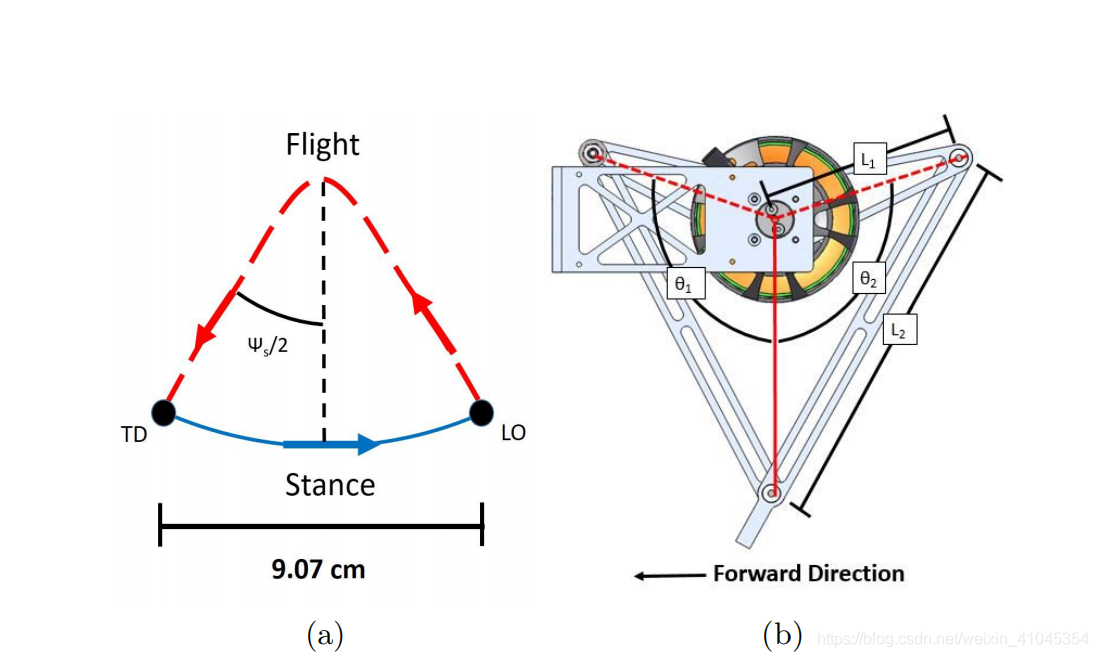 上图展示了minitaur的一条腿的整个运动周期,从摆动相到支撑相。ψs为支撑相扫过的角度,论文中详细的参数如下:
上图展示了minitaur的一条腿的整个运动周期,从摆动相到支撑相。ψs为支撑相扫过的角度,论文中详细的参数如下: 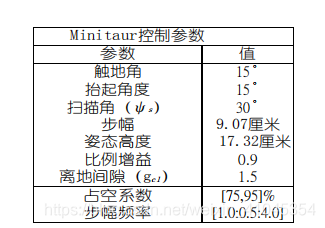 下面来介绍腿部运动学模型:
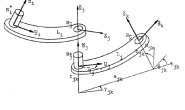
下面来介绍腿部运动学模型: 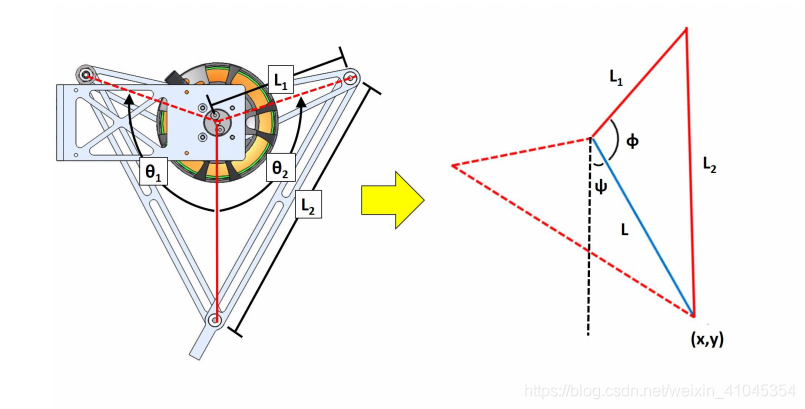 这里构造一个虚拟的腿L,对于给定腿部末端位置[x, y],有以下数量关系:
这里构造一个虚拟的腿L,对于给定腿部末端位置[x, y],有以下数量关系:  根据以上关系,我们可以求出电机所需要的控制角度为 θ1=ϕ−ψ θ2=ϕ+ψ 需要注意的是,在之前构建的仿真环境中,我们直接用三角函数来生成摆角信号和伸展角,即: ψ=0.3sin(2πft+φ) ϕ=0.35cos(2πft+φ) 其中,f 为频率,用于控制信号周期,φ为相位
根据以上关系,我们可以求出电机所需要的控制角度为 θ1=ϕ−ψ θ2=ϕ+ψ 需要注意的是,在之前构建的仿真环境中,我们直接用三角函数来生成摆角信号和伸展角,即: ψ=0.3sin(2πft+φ) ϕ=0.35cos(2πft+φ) 其中,f 为频率,用于控制信号周期,φ为相位