仅供个人学习记录
前言
DH法一般用一次就丢,然后后面再需要用的时候就会忘,所以本文整理了DH建模法,方便需要使用的时候进行参考。这里不讲原理,只讲结论和方法
1. 建模方法(简述)
DH法可分成以下几步:
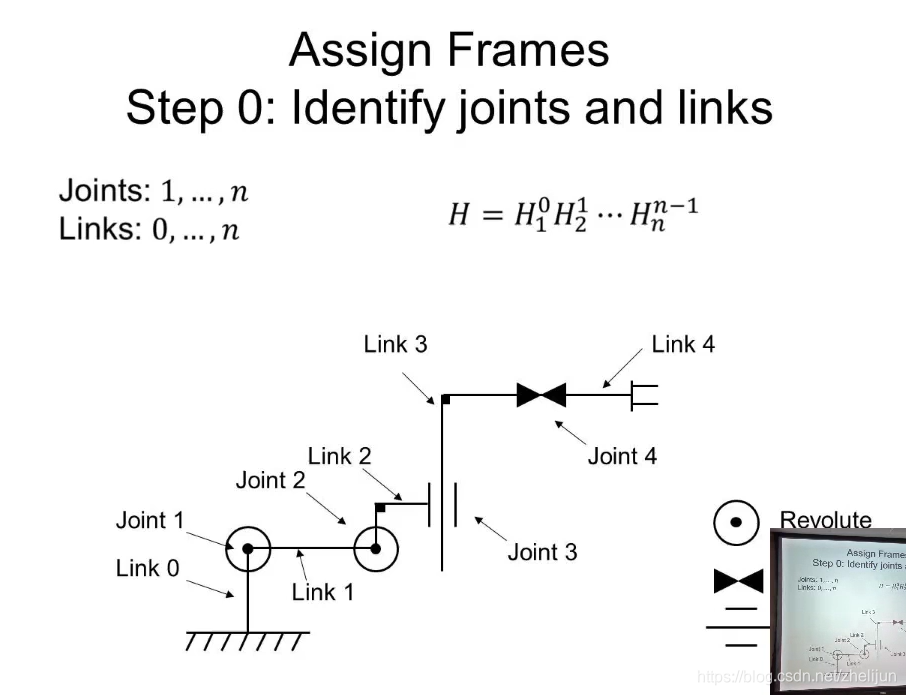
- 辨认出关节和连杆(关节序号从1到n,连杆序号从0到n)
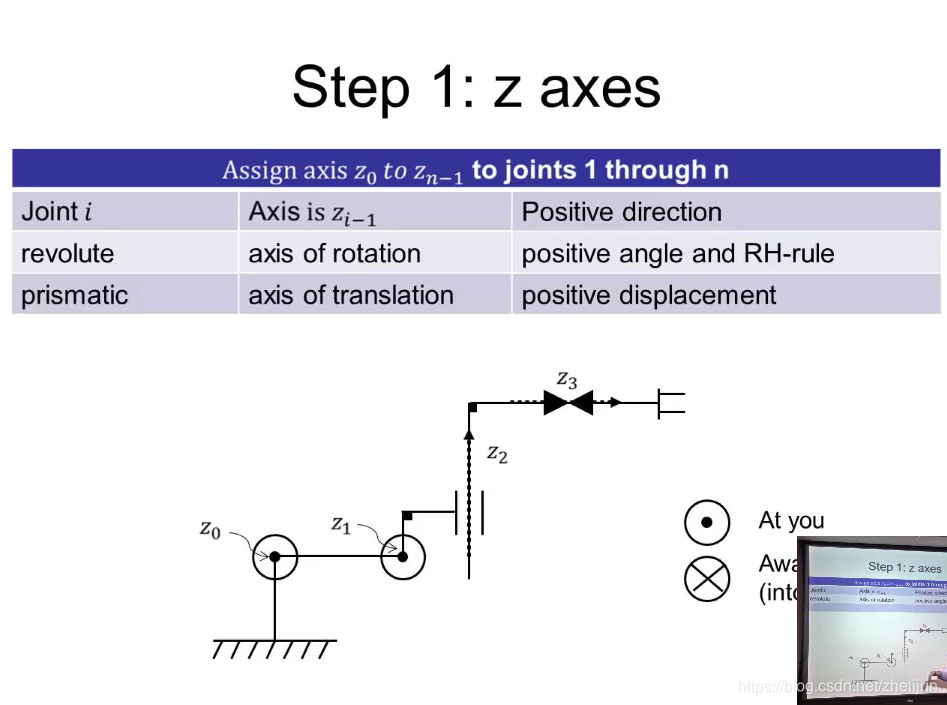
- 确定Z轴(n号关节上的坐标系序号为n-1)
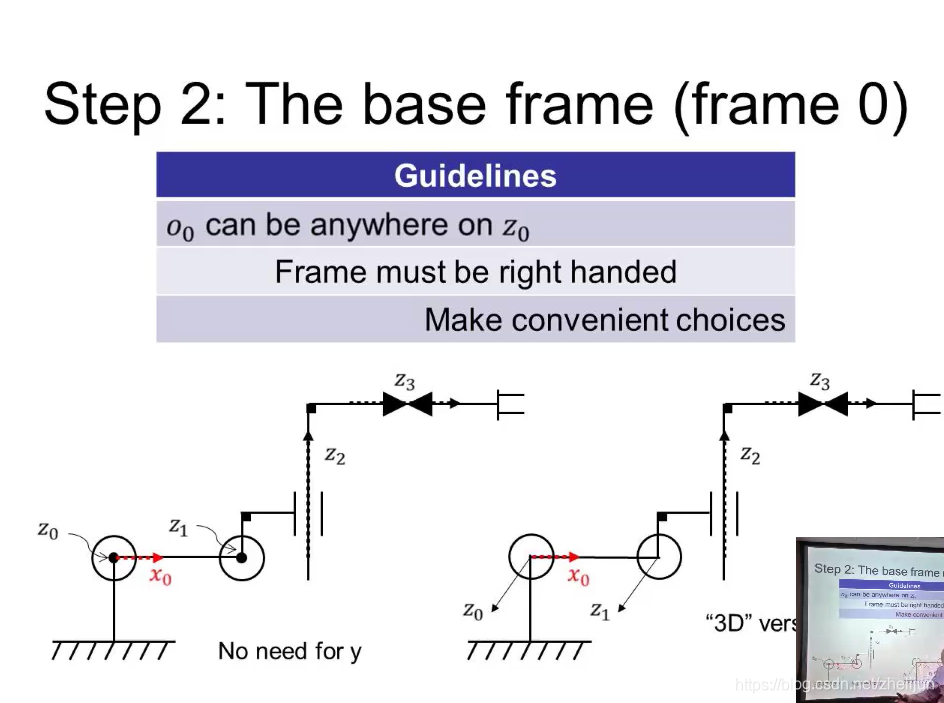
- 确定每个坐标系的原点
- 确定XY轴
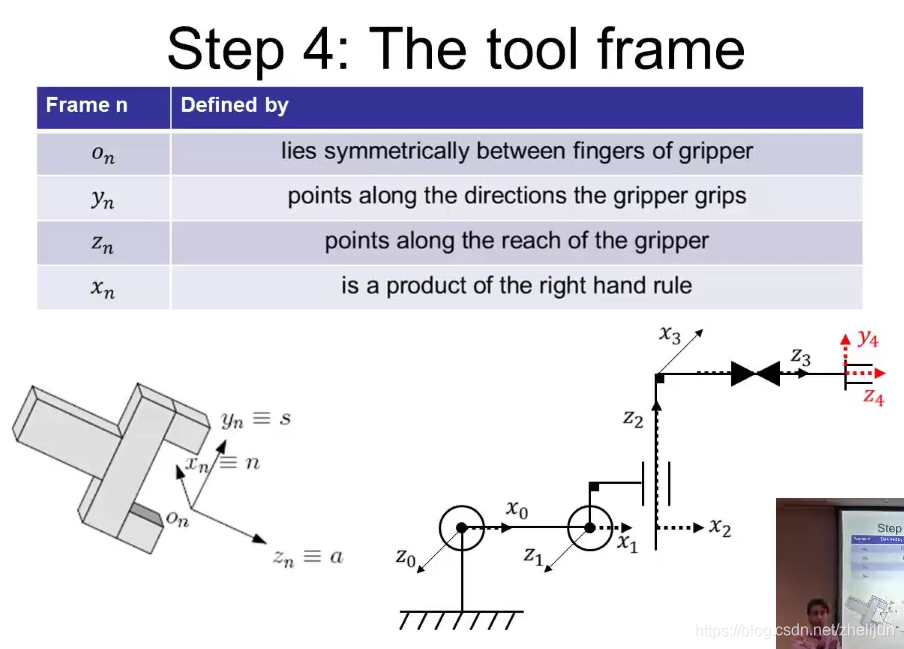
- 确定Tool frame(根据Tool fram是否满足DH潜在条件而决定是否要特殊处理)
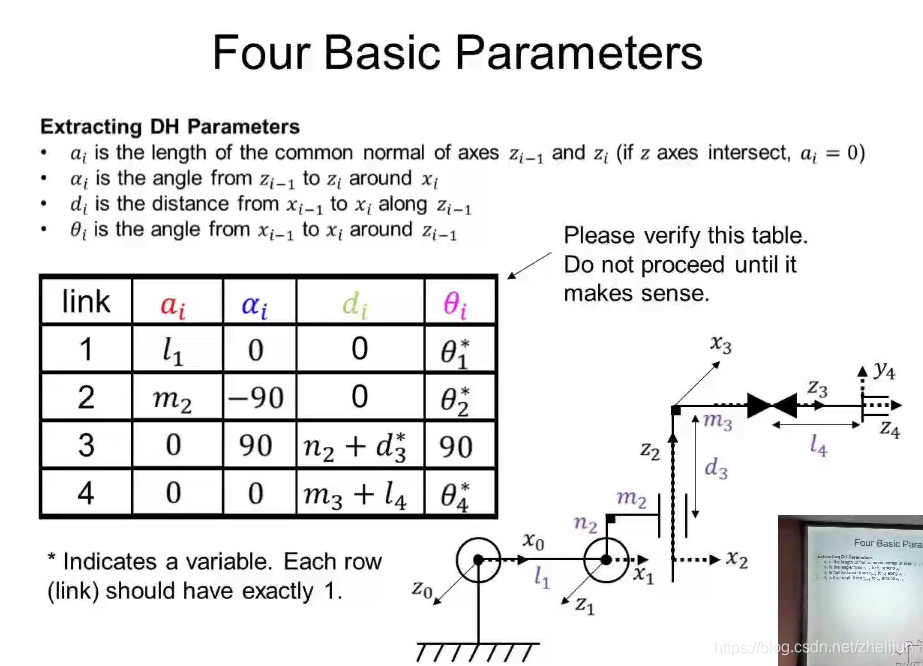
- 写出DH参数表
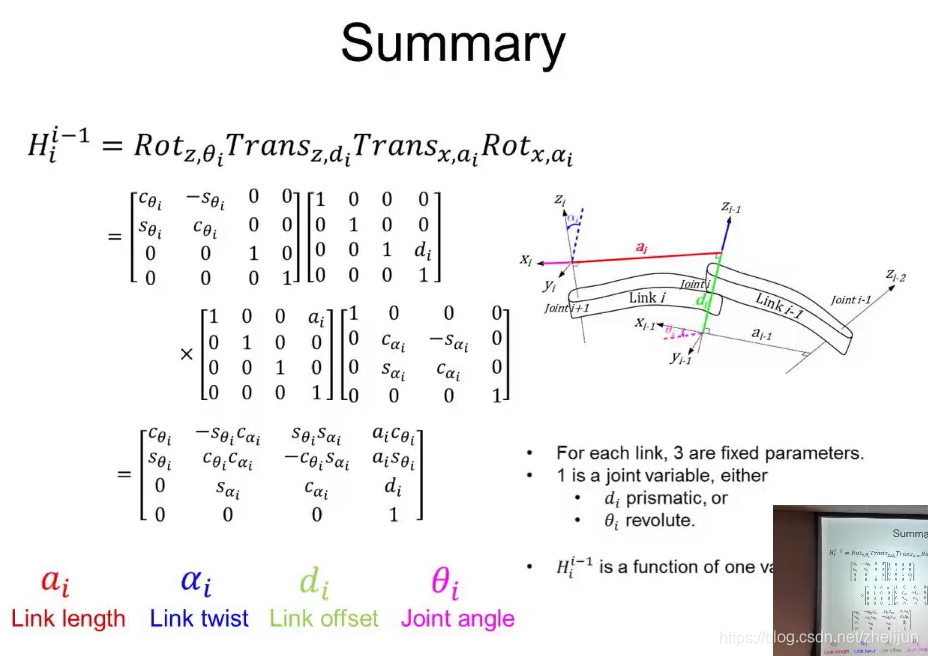
- 写出转换方程
其中对于第二步情况也要分为两种
- 旋转关节
- 平动关节
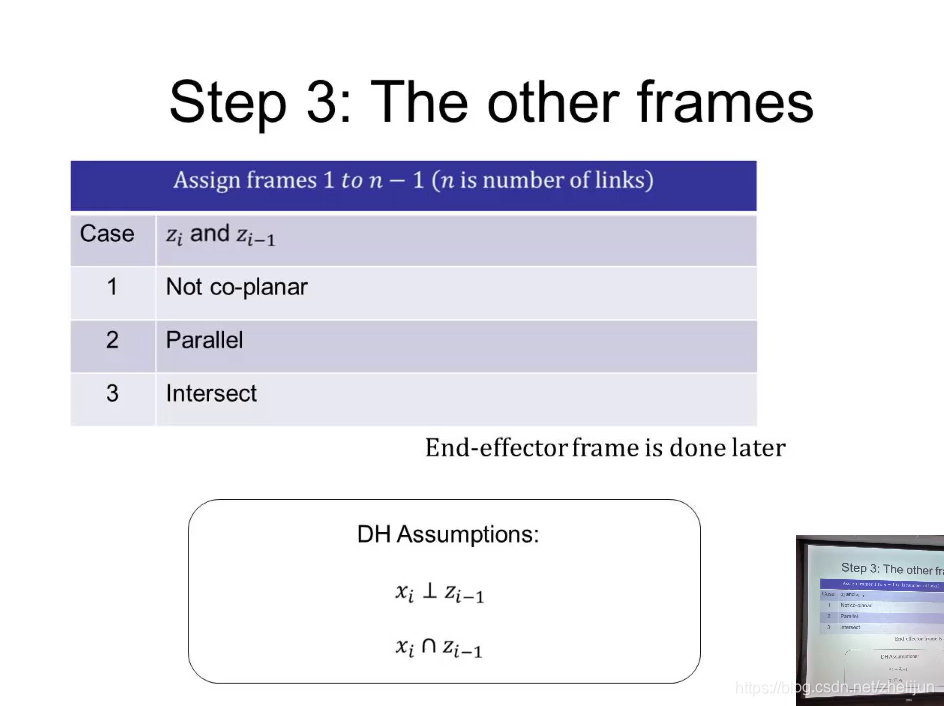
其中对于第四步情况分为三种:
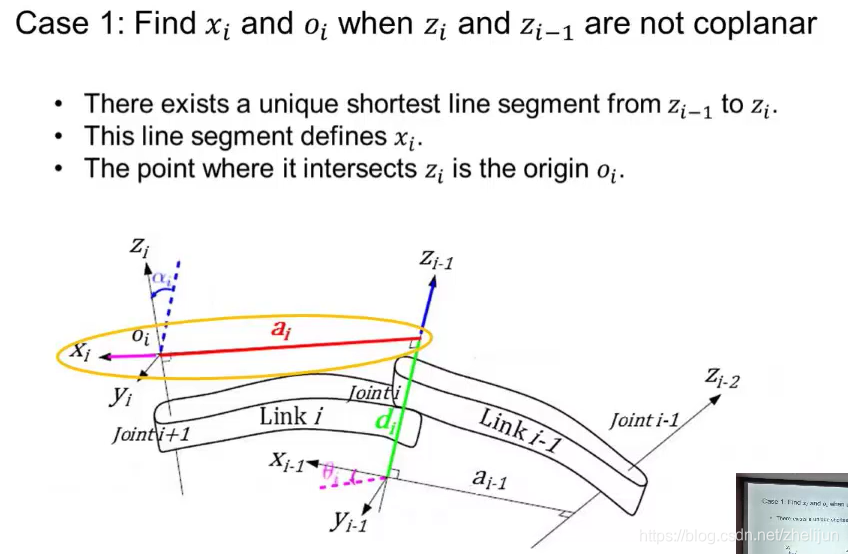
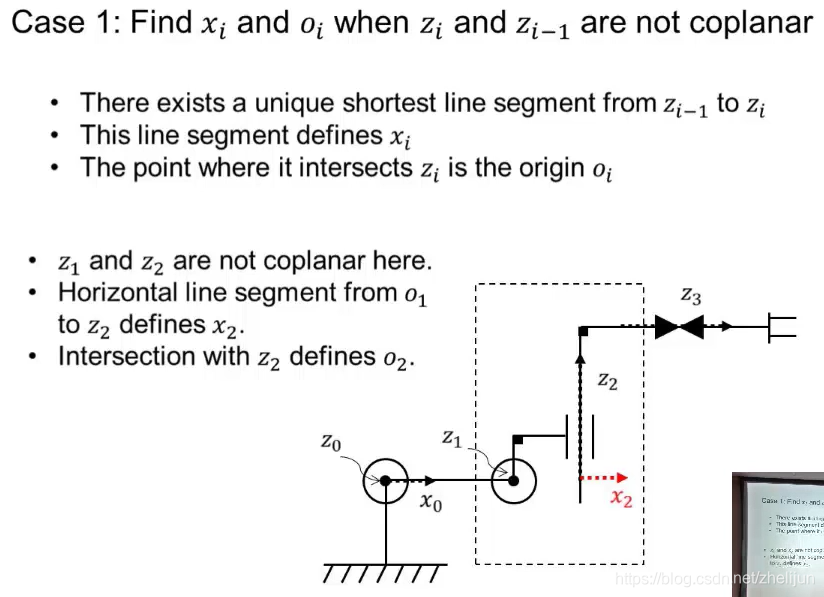
- Zi与Zi-1不共面
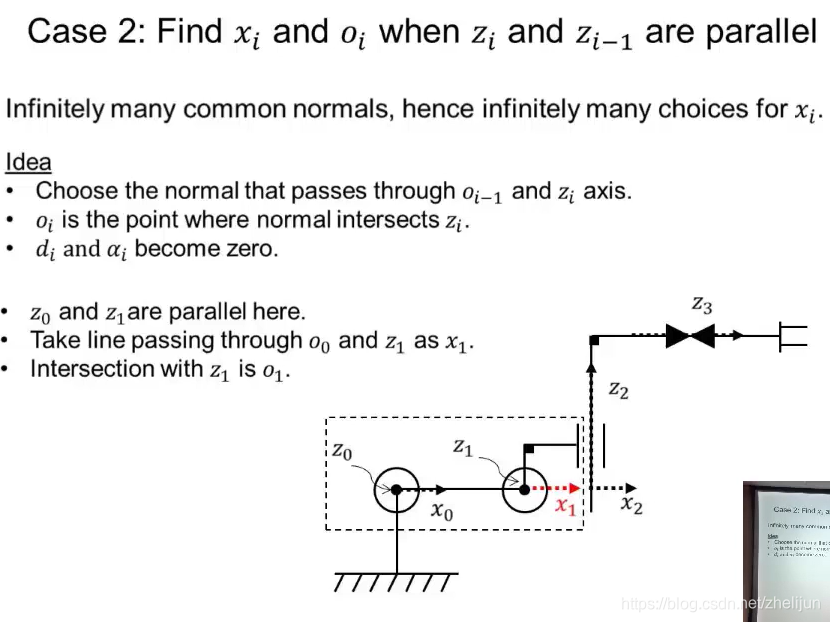
- Zi与Zi-1平行
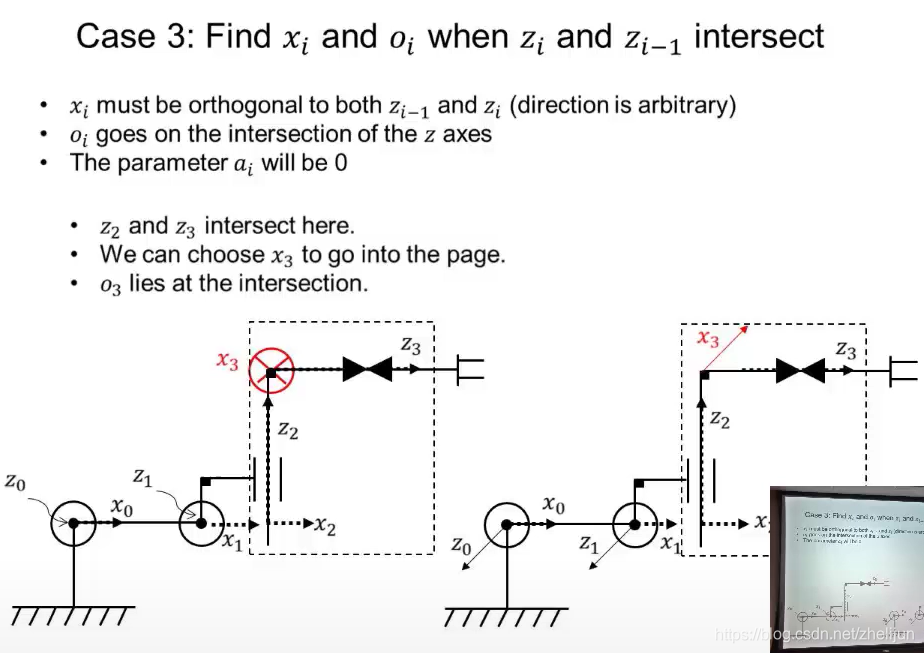
- Zi与Zi-1相交
关于第5点的补充: DH方法默认的两个条件是:  除了Tool frame以外的frame 是按照规则建系的,因此只有Tool frame的x轴需要注意这两个条件。如果建完Tool frame发现不满足上述条件,应该采取以下三种解决方法的其中一种:
除了Tool frame以外的frame 是按照规则建系的,因此只有Tool frame的x轴需要注意这两个条件。如果建完Tool frame发现不满足上述条件,应该采取以下三种解决方法的其中一种:
- 抛弃DH法直接用坐标转换来完成最后那个转换矩阵
- 调整Tool frame使其能够使用DH法
- 在tool frame前面再额外增加一个frame,相应的DH表也要多一行
一些有用的结论:
- 坐标系是附着在前一个连杆上的,关节运动的时候,该关节上的坐标系不会跟着后面的连杆运动
- 坐标系的建立方法并不唯一
2. 建模方法(详细)
需要建模的话,按照如下步骤一步步建模即可。注意tool frame那边建完了需要检查