理论基础(D-H) 此处理论基础取自《机器人导论》采用改进的Modifird DH参数模型 R代表转动副,P代表移动副 有N个关节(编号从1到N)机械臂具有N+1个连杆(编号从0到N)连杆0是机械臂基座,连杆N固连末端执行器或者工具,关节i将连杆……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3504浏览 0评论1890个赞
目录1. 引言2. 建立DH坐标系的技巧2.1 理清关节和连杆2.2 画 z 轴<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3907浏览 0评论286个赞
仅供个人学习记录 前言 DH法一般用一次就丢,然后后面再需要用的时候就会忘,所以本文整理了DH建模法,方便需要使用的时候进行参考。这里……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2338浏览 0评论1723个赞
能力强的大佬可以直接看原文《A new geometric notation for open and close-loop robots》 另外……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3688浏览 0评论849个赞
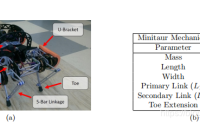
文章目录 一、结构参数二、腿部运动空间 随着人类环境中对机器人交互的需求不断增长,动态四足机器人的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3368浏览 0评论1099个赞
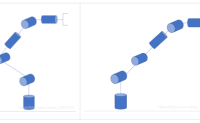
计算正向运动学通常需要使用D-H参数法对机械臂建模。 第一步: 绘制机械臂模型图 可用手绘机械臂结构简图或者模型图,使用圆柱体代表转动关节和线表示的连杆,当写论文的时候,可以使用PPT或者CAD来绘图,ppt里面提供了很多现成的线条形状,通过组合功能可以设计出很ni……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1945浏览 0评论2708个赞
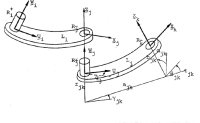
standard_DH 根据DH表示法确定一个一般步骤为每个关节指定参考坐标系,然后确定如何实现任意两个相邻坐标系之间的变换,最后写出机器人的总变换矩阵。如图所示表示了三个顺序关节和两个连杆,每个关节都是可以转动和平移的。第一个关节指定为关节i-1……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2895浏览 0评论1389个赞
二、工业机器人动力学 机器人动力学描述的是关节力矩、动力学参数及关节运动的关系,用于机器人动力学建模的方法很多,如牛顿-欧拉方法、拉格朗日方法、凯恩方法、算子代数方法等。对于同一个机器人,无论采用何……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3369浏览 0评论2973个赞