gazebo
- 一、什么是Gazebo?
-
- Gazebo的典型用途
- Gazebo的一些主要特点
- 二、系统要求
- 三、安装
-
- 1.添加源
- 2.安装Gazebo
- 四、用户界面
-
- 1、场景
- 2、左右面板
- 3、工具栏
- 4、菜单栏
- 5、鼠标
一、什么是Gazebo?
Gazebo是一款3D动态模拟器,能够在复杂的室内和室外环境中准确有效地模拟机器人群。与游戏引擎提供高保真度的视觉模拟类似,Gazebo提供高保真度的物理模拟,其提供一整套传感器模型,以及对用户和程序非常友好的交互方式。
Gazebo的典型用途
- 测试机器人算法
- 设计机器人
- 用现实场景进行回归测试
Gazebo的一些主要特点
- 包含多个物理引擎
- 包含丰富的机器人模型和环境库
- 包含各种各样的传感器
- 程序设计方便和具有简单的图形界面
二、系统要求
Gazebo官方建议,Gazebo目前最好在Ubuntu或者其他的Linux发行版上运行。同时您的计算机需要具有以下功能:
- 专用GPU:Nvidia卡往往在Ubuntu中运行良好
- 至少是Intel I5或同等产品的CPU
- 至少500MB的可用磁盘空间
- 安装尽可能高版本的Ubuntu Trusty
编者注:小编曾经在不同的硬件环境下运行过Gazebo(最低配置为i5-6200u,无GPU)。在经受多次折磨后,给出以下建议:
- 只有cpu的情况下也是可以运行Gazebo的,但是场景过于庞大时频繁会出现闪退和卡死。
- 当可用内存过低运行内存而导致界面闪退(这样你的心血就没了),为了避免这种情况最好使用8G+的内存。
- 不同版本的linux发行版下的Gazebo使用并无太大差别,但是还是建议使用ubuntu,毕竟官方教程都是在ubuntu下运行的。
三、安装
原则上Gazebo是跟ros一起使用的,但是这个系列并不是在教ros的使用,所以还是把Gazebo单独拿出来说
1.添加源
$sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
$wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
2.安装Gazebo
$sudo apt-get update
$sudo apt-get install gazebo9
$sudo apt-get install libgazebo9-dev
注:小编在自己的电脑上(ubuntu18.04)按以上步骤未出现错误,如果出现错误可以自行百度or留言,建议参考官方教程(http://gazebosim.org/tutorials?tut=guided_b1&cat=)。
四、用户界面
这节将对Gazebo图形用户界面和GUI进行介绍。我们将学习到一些基本操作,例如按钮的功能以及如何在场景中导航。 首先,你应该安装好Gazebo了。然后你可以按Alt-F2,键入Gazebo,然后按Enter键。你就可以看到Gazebo的启动图标了。
 安装,UI介绍") tips:看到这个界面按下回车就出来拉~然后你应该看到这个画面
tips:看到这个界面按下回车就出来拉~然后你应该看到这个画面
 安装,UI介绍") 现在我们介绍界面的各个组成,相信大家英文都不错,部分图片就直接用官方的图片了,如果觉得有困难的同学可以配合注释理解。
现在我们介绍界面的各个组成,相信大家英文都不错,部分图片就直接用官方的图片了,如果觉得有困难的同学可以配合注释理解。
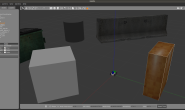
1、场景
场景是模拟器的主要部分,是仿真模型显示的地方,你可以在这操作仿真对象,使其与环境进行交互。
 安装,UI介绍")
2、左右面板
 安装,UI介绍") a、左面板 启动Gazebo时,默认情况下界面会出现左侧面板。面板左上方有三个选项卡:
a、左面板 启动Gazebo时,默认情况下界面会出现左侧面板。面板左上方有三个选项卡:
- WORLD:“世界”选项卡,显示当前在场景中的模型,并允许你查看和修改模型参数,例如它们的姿势。你还可以通过展开“GUI”选项并调整相机姿势来更改摄像机视角。
- INSERT:“插入”选项卡,向模拟添加新对象(模型)。要查看模型列表,您可能需要单击箭头以展开文件夹。在要插入的模型上单击(和释放),然后在场景中再次单击以添加它。
- LAYER:“图层”选项卡可组织和显示模拟中可用的不同可视化组(如果有)。图层可以包含一个或多个模型。打开或关闭图层将显示或隐藏该图层中的模型。这是一个可选功能,因此在大多数情况下此选项卡将为空。要了解有关图层的更多信息,请查看(http://gazebosim.org/tutorials?tut=visual_layers&cat=build_robot)
b、右侧面板 默认情况下Gazeb界面隐藏右侧面板。单击并拖动栏以将其打开。右侧面板可用于与所选模型(joint)的移动部件进行交互。如果未在场景中选择任何模型,则面板不会显示任何信息。
3、工具栏
Gazebo界面有两个工具栏。一个位于场景上方,另一个位于下方。 a、上部工具栏
 安装,UI介绍") 上部工作栏是Gazebo的主工具栏,它包含一些最常用的与模拟器交互的选项,例如:选择,移动,旋转和缩放对象等按钮; 创造一些简单的形状(如立方体,球体,圆柱体); 复制/粘贴模型选项。 -选择模式(select mode):在场景中导航
上部工作栏是Gazebo的主工具栏,它包含一些最常用的与模拟器交互的选项,例如:选择,移动,旋转和缩放对象等按钮; 创造一些简单的形状(如立方体,球体,圆柱体); 复制/粘贴模型选项。 -选择模式(select mode):在场景中导航
- 翻译模式(translate mode):选择要移动的模型
- 旋转模式(rotate mode):选择要旋转的模型
- 缩放模式(scale mode):选择要缩放的模型
- 撤消/重做(undo/redo):撤消/重做场景中的操作
- 简单形状(simple shape):将简单形状插入场景中
- 灯光(lights):为场景添加灯光
- 复制/粘贴(copy/paste):在场景中复制/粘贴模型
- Align:将模型彼此对齐
- Snap:将一个模型与另一个模型对齐
- 更改视图(change view):从各个角度查看场景
b、底部工具栏
 安装,UI介绍") 底部工具栏显示有关模拟的数据,如模拟时间及其与实际时间的关系。
底部工具栏显示有关模拟的数据,如模拟时间及其与实际时间的关系。
- “模拟时间”是指模拟运行时模拟器中时间流逝的速度。模拟时间可以比实时更慢或更快,具体取决于运行模拟所需的计算量。
- “实时”是指模拟器运行时在现实生活中经过的实际时间。模拟时间和实时之间的关系称为“实时因子”(RTF)。它是模拟时间与实时的比率。RTF衡量模拟运行与实时相比的速度或速率。
- Gazebo的世界状况每迭代一次,计算一次。你可以在底部工具栏的右侧看到迭代次数。每次迭代都会将模拟推进固定的秒数,称为步长。默认情况下,步长为1 ms。您可以按暂停按钮暂停模拟,并使用步骤按钮逐步执行几个步骤。
4、菜单栏
像大多数应用程序一样,Gazebo顶部有一个应用程序菜单。某些菜单选项会显示工具栏中。在场景中,右键单击上下文菜单选项,可查看各种菜单。
 安装,UI介绍") 注意:某些Linux桌面会隐藏应用程序菜单。如果没有看到菜单,请将光标移动到应用程序窗口的顶部,然后会出现菜单。
注意:某些Linux桌面会隐藏应用程序菜单。如果没有看到菜单,请将光标移动到应用程序窗口的顶部,然后会出现菜单。
 安装,UI介绍")
5、鼠标
鼠标操作方法,一般常用的就是“shift+鼠标左键”转换视角,“鼠标左键”平移视角,“滚轮”缩放大小
 安装,UI介绍") 至此我们已经介绍完gazebo的安装、界面以及一些基本操作了,在下一篇中会介绍如何构建一个简单的机器人,敬请期待噢。
至此我们已经介绍完gazebo的安装、界面以及一些基本操作了,在下一篇中会介绍如何构建一个简单的机器人,敬请期待噢。