本篇将会对四足机器人的俯仰角进行数学建模,求解器正逆运动学解,包含详细公式推导与计算
一、数学建模
1、几何模型
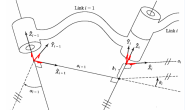
 假设俯仰角为λ,对于坐标系A足端位置PA[x,y],我们求出其在B坐标系下的位置PB=[x′,y′],然后通过逆运动学求解关节角度θ1,θ2即可。假定机器人半身长为L,腿长分别为L1, L2
假设俯仰角为λ,对于坐标系A足端位置PA[x,y],我们求出其在B坐标系下的位置PB=[x′,y′],然后通过逆运动学求解关节角度θ1,θ2即可。假定机器人半身长为L,腿长分别为L1, L2
2、坐标变换
前腿
a、坐标系A-O变换矩阵  b、坐标系O-B变换矩阵:
b、坐标系O-B变换矩阵:  根据变换矩阵,我们可以求出PB坐标: PB=T2T1PA 即:
根据变换矩阵,我们可以求出PB坐标: PB=T2T1PA 即:  化简之后:
化简之后: 
后腿
对于后腿实际上只是L取反即可: 
3、逆运动学求解
根据离地高度确定初始位置P0,再根据变换矩阵将其转换致参考系B中得到PB,通过逆运动学求解两个关节角度,公式如下: 
4、最大俯仰角
对于给定离地高度h,俯仰角存在一个最大值,在实际控制时,我们需要保证俯仰角在允许范围内。  如上图,当L1, L1共线时,俯仰角最大,此时有以下关系:
如上图,当L1, L1共线时,俯仰角最大,此时有以下关系:  其中φ=atan2(h,L),因此我们可以解出此时的r
其中φ=atan2(h,L),因此我们可以解出此时的r