在Jungle的上一篇博客里简单介绍了机器人位姿描述与坐标变换的基本知识(矩阵)其中关键点之一是变换算子的左乘和右乘:
变换算子左乘:表示该变换是相对固定坐标系变换
变换算子右乘:表示该变换是相对动的坐标系(新坐标系)变换。
这一节里Jungle将在上一篇文章和变换算子的基础上,总结一下在机器人运动学分析里面,机器人关节坐标系变换关系。
1.简介
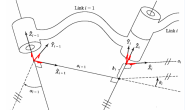
以六自由度工业机器人(6R)为例,由六个关节组成,每个关节具备一个旋转自由度。相邻相关节由一根连杆连接。这里上一张机器人学里的经典图:

这是相邻两个连杆i-1和连杆i,以及关节坐标系和
。连杆i-1长度为
,连杆i-1和连杆i轴线(Z轴)扭角为
,两关节距离为
,关节转角为
。(这部分知识是机器人D-H建模,相关知识参https://blog.csdn.net/sinat_21107433/article/details/78937391)
2.变换关系
由上图可以看到,由关节i-1变换到关节i,经历的变换与四个参数有关,即,
,
和
。变换顺序即内容如下:
- 绕
轴旋转
;
- 沿
;
- 绕
轴旋转
;
- 绕
这几个变换都是相对运动坐标系的变换(并不是相对于绝对坐标系的变换,因为关节时刻在运动,即关节坐标系时刻在运动),因此,上述变换算子依次右乘:

根据上述变换公式,以及机器人的D-H参数,可以得到机器人6个关节每相邻两个关节之间的变换关系矩阵,
,
,
,
和
,并且可以得到从机器人基坐标系到末端坐标系(法兰盘坐标系)的变换关系:

3.机器人工具TCP
机器人末端关节是法兰盘,实际应用中会安装各式各样的工具,比如焊枪,铣刀,抓手等。机器人正式加工之前,首先要通过示教器对工具进行标定,现有的方法一般是五点法、四点法,即操作机器人工具以5个(4个)不同的姿态去到达同一个点,每个点对应机器人的一组位姿参数,机器人根据这几组位姿参数会自动计算出工具TCP到法兰盘坐标系原点的位姿变换参数x,y,z,rx,ry,rz.
这里说到的TCP,是(Tool Center Point,工具中心点)的简称,也是工具坐标系TCS(Tool Coordinate System)的原点。焊枪的TCP是枪的尖端,铣刀的TCP是铣刀刀尖端。
因此,在第二节的关系式里再加上工具变换关系。可以得到从机器人基坐标系到工具TCP的变换关系:
![]()
结合本文和上一篇博文 机器人位姿描述与坐标变换,再去看Jungle之前的两篇文章: