矩阵变换是机器人学的基础,所以Jungle把这一节内容划分到“工业机器人”栏目。这一节Jungle用C++设计了矩阵的类Matrix,并设计了3个方法:矩阵相加add矩阵相乘multiply求……继续阅读 » 5年前 (2021-04-26) 2188浏览 0评论820个赞
在Jungle的上一篇博客里简单介绍了机器人位姿描述与坐标变换的基本知识(矩阵)其中关键点之一是变换算子的左乘和右乘:变换算子左乘:表示该变换是相对固定坐标系变换变换算子右乘:表示该变换是相对动的坐标系(新坐标系)变换。这一节里J……继续阅读 » 5年前 (2021-04-26) 2469浏览 0评论756个赞
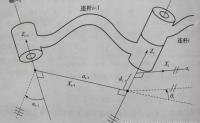
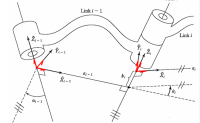
1. 建立各个连杆的坐标轴关节i的轴向方向为坐标系i的Zi轴;取Zi-1和Zi轴的公法线方向为Xi-1轴;若两个Z轴相交,则取两个Z轴的叉积方向作为X轴方向。Zi轴和Xi……继续阅读 » 5年前 (2021-04-26) 1578浏览 0评论2418个赞
6R机器人运动学分析Jungle在https://blog.csdn.net/sinat_21107433/article/details/78937391提到了6自由度串联机器人D-H建模的方法,其实在很多文献资料里也有。但针对具体的应用,我们使用统……继续阅读 » 5年前 (2021-04-26) 2899浏览 0评论654个赞
机器人的位姿描述与坐标变换是进行工业机器人运动学和动力学分析的基础。本节简要介绍上述内容,明确位姿描述和坐标变换的关系,用到的基本数学知识就是——矩阵。1.位姿表示……继续阅读 » 5年前 (2021-04-26) 3044浏览 0评论2448个赞
本文Jungle简单实现一个6自由度的工业机器人仿真控制器,用户可以通过界面上6个轴的滑条控制机器人的姿态。……继续阅读 » 5年前 (2021-04-26) 3097浏览 0评论1679个赞