本篇将会对四足机器人的俯仰角进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 一、数学建模 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2506浏览 0评论402个赞
ROS TF2 中的 四元数 基础部分1、四元数的组成……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2855浏览 0评论2571个赞
在Jungle的上一篇博客里简单介绍了机器人位姿描述与坐标变换的基本知识(矩阵)其中关键点之一是变换算子的左乘和右乘:变换算子左乘:表示该变换是相对固定坐标系变换变换算子右乘:表示该变换是相对动的坐标系(新坐标系)变换。这一节里J……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2162浏览 0评论2283个赞
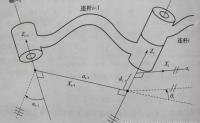
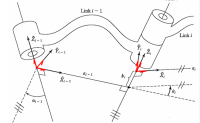
1. 建立各个连杆的坐标轴关节i的轴向方向为坐标系i的Zi轴;取Zi-1和Zi轴的公法线方向为Xi-1轴;若两个Z轴相交,则取两个Z轴的叉积方向作为X轴方向。Zi轴和Xi……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2027浏览 0评论584个赞
6R机器人运动学分析Jungle在https://blog.csdn.net/sinat_21107433/article/details/78937391提到了6自由度串联机器人D-H建模的方法,其实在很多文献资料里也有。但针对具体的应用,我们使用统……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1517浏览 0评论309个赞
机器人和计算机视觉中的一个基本要求是能够表示物体在环境中的位置和方向。这些物体包括机器人、摄像机、工件、障碍物和路径。空间中的点是数学中一个熟悉的概念,它可以被描述为一个坐标向量,也被称为一个约束向量,如图 (a) 所示。向量表示点相对于某个参考坐标系的位……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2144浏览 0评论830个赞
三维情况实际上是之前讨论的二维情况的延伸。我们在二维坐标系上增加一个额外的坐标轴,通常用 z 表示,它同时与 x 轴和 y 轴正交。 z 轴的方向服从右手规则,并构成右手坐标系。与各坐标轴平行的单位向量……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2213浏览 0评论2429个赞
机器人的位姿描述与坐标变换是进行工业机器人运动学和动力学分析的基础。本节简要介绍上述内容,明确位姿描述和坐标变换的关系,用到的基本数学知识就是——矩阵。1.位姿表示……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2128浏览 0评论674个赞
正如在二维情况下一样,我们可以用相对于参考坐标系的坐标轴单位向量表示它们所在坐标系的方向。每一个单位向量有 3 个元素,它们组成了 3×3 阶正交矩阵 ARB :<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2857浏览 0评论2385个赞