这是一篇面向神马都不懂的小白玩家的PCB设计教程。希望能帮助大家快速上手PCB的设计。1 预备知识1.1 常用工具做图工具:Altium DesignerPCB板加工:嘉立……继续阅读 » 5年前 (2021-04-26) 3310浏览 0评论2412个赞
前言在上一篇文章中,我们了解了用于表示机器人……继续阅读 » 5年前 (2021-04-26) 2592浏览 0评论2062个赞
滤波理论在机器人状态估计里的重要性不言而喻,因此对滤波理论进行系统的了解非常有必要。本篇文章目的是从贝叶斯滤波(BF)的角度来串联现在流行的几种滤波方法:卡尔曼(KF)、扩展卡尔曼(EKF)、无迹卡尔曼(UKF)、粒子滤波(PF)等。……继续阅读 » 5年前 (2021-04-26) 2698浏览 0评论1318个赞
上一篇文章里介绍了贝叶斯滤波的理论框架,知道了贝叶斯滤波假设了机器人的状态服从某个概率分布,并且知道了如何利用Bayes公式对其概率分布更新。然而,前面的内容仅仅是介绍了其完美的数学原理,实际计算起来却并不适用。在这篇文章中,就将介绍如何通过一系列假设去简化……继续阅读 » 5年前 (2021-04-26) 2438浏览 0评论1087个赞
前面两篇文章里首先介绍了贝叶斯滤波的理论框架,之后对机器人模型做了线性高斯假设,推出了卡尔曼滤波的迭代方程组。在这篇文章中,就将进一步介绍当机器人模型为非线性时该如何使用贝叶斯滤波。我们将介绍扩展卡尔曼滤波器以及无迹卡尔曼滤波器的由来。 ……继续阅读 » 5年前 (2021-04-26) 1904浏览 0评论1417个赞
机器人专业的学生,多多少少总需要和机械结构打点交道。有时候可能是做个安装设备的架子,有时候可以需要个简单的运动机构,这些简单的东西如果找别人做就会耽误很长的一段时间。这个时候掌握一点Solidworks绘图技能,你的苦恼就消失啦。 <……继续阅读 » 5年前 (2021-04-26) 3148浏览 0评论811个赞
一阶贝塞尔曲线(包含两个控制点)假设控制点为P0和P1,曲线方程为: ……继续阅读 » 5年前 (2021-04-26) 1936浏览 0评论2692个赞
本文介绍了如何利用MATLAB辨识状态空间方程中的未知参数。 假设我们的被控系统的表达如下: ……继续阅读 » 5年前 (2021-04-26) 2141浏览 0评论630个赞
原理对于ROS里面用Python写的节点,是可以直接用 python your_node_name<……继续阅读 » 5年前 (2021-04-26) 2625浏览 0评论2110个赞
……继续阅读 » 5年前 (2021-04-26) 2962浏览 0评论2337个赞
1. 原理1.1 AB相编码器 ……继续阅读 » 5年前 (2021-04-26) 3310浏览 0评论753个赞
导言你也在机器人动力学仿真过程中,遭遇了许多BUG吗? 没关系,在这里或许能找到你想要的答案! 正文先来考虑一个很简单的情况,假设有一个椭……继续阅读 » 5年前 (2021-04-26) 2683浏览 0评论413个赞
全文目录什么是RQT?一个RQT Plugin的工程目录各文件详细说明程序运行逻辑编写RQT插件的具体操作步骤<……继续阅读 » 5年前 (2021-04-26) 2058浏览 0评论1652个赞
全文目录什么是RQT?一个RQT Plugin的工程目录各文件详细说明程序运行逻辑编写RQT插件的具体操作步骤<……继续阅读 » 5年前 (2021-04-26) 1549浏览 0评论537个赞
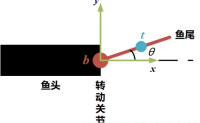
两连杆机器鱼的简单建模方法在机器鱼的建模过程中,无可避免地会遇到一个问题,那就是: 机器鱼的推进力是如何产生的呢?……继续阅读 » 5年前 (2021-04-26) 3350浏览 0评论2957个赞
工具和参考链接由于机器人动力学模型往往都是非线性的,这里用到的工具是: MATLAB的System Identification Toolbox(系统辨识工具箱),其中的Nonlinear Grey-Box……继续阅读 » 5年前 (2021-04-26) 2637浏览 0评论961个赞
作为航空航天类专业毕业,马上要入机器人坑、直博坑的小本科生,要来写这样一个系列的文章,我感到诚惶诚恐。不过,人还是得有一些追求的,写这样一系列文章很难,但是相信对我自己的提升也会不少。当然,作为一名资深小白,出点错误、理解得不透彻的情况很有可能会在这个系列的文章中屡屡出现,……继续阅读 » 5年前 (2021-04-26) 1864浏览 0评论218个赞
Hello! 欢迎来到我的博客 今天的内容关于机器人中常用的传感器IMU,我们用它来实现机器人姿态、速度、位置的估计。 今天将会介绍使用低成本IMU进行机器人运动估计的一个常用方法——ESKF。……继续阅读 » 5年前 (2021-04-26) 2087浏览 0评论2071个赞
Hello! 欢迎来到我的博客 今天的内容关于机器人中常用的传感器IMU,我们用它来实现机器人姿态、速度、位置的估计。 今天将会介绍使用低成本IMU进行机器人运动估计的一个常用方法——ESKF。 3 ……继续阅读 » 5年前 (2021-04-26) 3302浏览 0评论2588个赞
上一篇文章中,写过了关于两连杆机器鱼建模的方法。实际上,有一个细节值得注意,那就是在联立(1)和(2)方程,求解鱼头加速度,这一步中,是如何联立求解的。一般有两种方式: ……继续阅读 » 5年前 (2021-04-26) 2852浏览 0评论294个赞
Hello,欢迎做客我的博客! 在动力学仿真中,我们不得不采用迭代的方法进行数值计算,这个时候我们会用到离散化的数学模型。 可是,我们在建立模型时,考虑的都是连续的情况……继续阅读 » 5年前 (2021-04-26) 3356浏览 0评论2365个赞
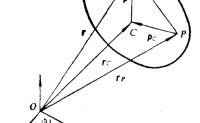
惯性张量是什么? 惯性张量是用于描述刚体转动惯性的一个量,并且它是一个矩阵。它通常表示为: ……继续阅读 » 5年前 (2021-04-26) 2861浏览 0评论2342个赞
刚体动力学基础学习 ……继续阅读 » 5年前 (2021-04-26) 2208浏览 0评论1960个赞
关于机器人运动学与动力学建模的几点迷思疑问1:运动学应该从速度开始推还是从位置开始推? 为什么会产生这样的疑问?我们可以从下面这个问题开始!……继续阅读 » 5年前 (2021-04-26) 3228浏览 0评论1348个赞
引言 这篇博客介绍的是,如何在windows环境下搭建基于CMake和GCC的开发环境。这里使用的编辑器是VSCode。害怕麻烦的同学不应该搭建这个开发环境,应该直接使用VS Studiao的集成开发环境。 而我之所以要搭建这个环境,是因为为了方便……继续阅读 » 5年前 (2021-04-26) 2643浏览 0评论534个赞
机器人动力学建模之牛顿欧拉法推导 ……继续阅读 » 5年前 (2021-04-26) 3863浏览 0评论2154个赞