工具和参考链接
由于机器人动力学模型往往都是非线性的,这里用到的工具是:
MATLAB的System Identification Toolbox(系统辨识工具箱),其中的Nonlinear Grey-Box Models(非线性灰箱建模工具),链接如下:
主要的参考示例:
Modeling an Industrial Robot Arm
1 机器人动力学模型
在对模型参数进行辨识之前,首先需要对机器人进行建模,建模的方法通常是牛顿欧拉法或者拉格朗日方法。关于建模的部分,读者可以参考我之前的博客。如:
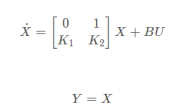
此处,直接给出机器人的非线性动力学模型如下:

其中,x代表状态,u代表输入,y代表输出。
Ka和Kb为待辨识参数。
2 辨识前的准备——采集实验数据
在进行参数辨识前,我们需要采集输入和输出数据,即给定一组u,然后记录系统的y。通常,我们可以让u是正弦信号,或者多个正弦信号的叠加,以获得更好的辨识效果。
通常来说,我们需要通过实验去采集数据。
在这里,我们的目的是介绍MATLAB系统辨识工具箱的用法,为了更加直观的看出系统辨识的效果,我们可以基于上述动力学模型生成一组数据,来检验MATLAB的系统辨识效果。
数据生成程序:
clc;
clear all;
close all;
period = 0.01; % 注意这里是采样时间
T = 10;
% 参数设置
Ka = 1.21;
Kb = -0.6;
x1 = 0;
x2 = 0;
x3 = 0;
Input = [];
Output = [];
for t = 0:period:T
% 给定输入,正弦函数
u = sin(2*pi/10*t);
% 系统动力学模型迭代
x1_p = x1 + Ka*sin(x2)*period;
x2_p = x2 + Kb*x3^2*period;
x3_p = x3 + u*period;
x1 = x1_p;
x2 = x2_p;
x3 = x3_p;
% 输出
y1 = x1;
y2 = x2;
y3 = x3;
% 保存数据
Input = [Input; u];
Output = [Output; y1,y2,y3];
end
% 保存数据
save('blogexample.mat', 'Input', 'Output');
注意,这里我们设置了Ka=1.21以及Kb=−0.6。下面,我们可以看看MATLAB是否能辨识得到这组参数。
3 系统辨识——MATLAB代码示例
利用MATLAB进行系统辨识的步骤分为两步:
- 定义模型文件(定义机器人动力学模型)
- 设置辨识过程()
3.1 模型文件
程序如下:
function [dx, y] = blogmodel_m(t, x, u, Ka, Kb, varargin)
%% 函数的参数dx,y,t,x,u不可更改
%% 函数参数Ka,Kb即为待辨识参数
% 输出方程
y = [x(1); x(2); x(3)];
% 动力学模型(微分方程),dx即为x的导数
dx = [Ka*sin(x(2)); ...
Kb*x(3)^2; ...
u];
end
3.2 定义辨识过程
整个辨识过程主要用到四个函数:
- idnlgrey:生成一个系统辨识对象(包含了系统模型,输入,状态,输出向量等等信息)
- iddata:将数据打包为iddata格式,便于系统辨识工具箱使用
- nlgreyest:系统辨识函数(主要函数,执行的就是优化参数的过程)
- compare:对比真实输出和模型输出的结果
下面是详细程序以及注释:
程序如下:
clc;
clear all;
close all;
%% 配置模型
FileName = 'blogmodel_m'; % 模型文件.
Order = [3 1 3]; % 输出、输入和状态向量的维数 [ny nu nx].
Parameters = [1, -1]'; % 待辨识参数的初始值
InitialStates = zeros(3, 1); % 系统状态的初始值
Ts = 0; % Time-continuous system.
% 生成一个系统辨识对象
nlgr = idnlgrey(FileName, Order, Parameters, InitialStates, Ts, ...
'Name', 'Blog Example Model', ... % 定义对象的名称
'InputName', {'Voltage'}', ... % 定义输入向量的名称
'InputUnit', {'V' }', ... % 定义输入向量的单位
'OutputName', {'Position' 'Velocity' 'Acceleration'}', ... % 定义输出向量的名称
'OutputUnit', {'m' 'm/s' 'm/s^2'}', ... % 定义输出向量的单位
'TimeUnit', 's'); % 定义时间的单位
% 设置系统状态向量的名称和单位
nlgr = setinit(nlgr, 'Name', {'Position' 'Velocity' 'Acceleration'}');
nlgr = setinit(nlgr, 'Unit', {'m' 'm/s' 'm/s^2'}');
% 设置待辨识参数的名称
nlgr = setpar(nlgr, 'Name', {'Ka : coeff 1' 'Kb : coeff2' });
nlgr.Parameters(1).Fixed = false; % 将参数1设置为可变参数,默认即为可变参数,若设置为固定参数,则优化时,该参数不变
nlgr.Parameters(1).Minimum = -10; % 设置参数1的下界为-10
nlgr.Parameters(1).Maximum = 10; % 设置参数1的上界为10
% 打印出nlgr的信息
present(nlgr)
%% 导入数据
dataset = load('blogexample.mat');
z = iddata(dataset.Output, dataset.Input, 0.01, 'Name', 'Actual Data'); % 将数据打包为iddata格式,注意这里面的0.01代表了数据采样时间为0.01秒
z.InputName = {'Voltage'}; % 定义输入向量的名称
z.InputUnit = {'V' }; % 定义输入向量的单位
z.OutputName = {'Position' 'Velocity' 'Acceleration'}; % 定义输出向量的名称
z.OutputUnit = {'m' 'm/s' 'm/s^2'}; % 定义输出向量的单位
z.Tstart = 0; % 定义起始时刻
z.TimeUnit = 's'; % 定义时间单位
present(z);
%% 参数效果
X0init = zeros(3,1);
nlgr = setinit(nlgr, 'Value', num2cell(X0init)); % 设置状态向量的初始值
figure(1)
% 对比系统真实输出和模型输出(参数辨识前)
compare(getexp(z, 1), nlgr, [], compareOptions('InitialCondition', X0init));
%% 辨识系统参数
nlgr = nlgreyest(nlgr, getexp(z, 1), nlgreyestOptions('Display', 'on')); % 系统辨识
figure(2)
% 对比系统真实输出和模型输出(参数辨识后)
compare(getexp(z, 1), nlgr, [], compareOptions('InitialCondition', X0init));
4 系统辨识结果
4.1 辨识前

4.2 辨识后

参数辨识的结果为:Ka=1.211和Kb=−0.600。和我们生成数据时设置的Ka=1.21以及Kb=−0.6几乎完全相同。
另外,从辨识结果也可以看到,参数辨识的效果相当只好。
5 更多
更多关于参数辨识过程的设置,比如优化算法,容许误差,可参考:
nlgreyestOptions
关于模型验证,参数辨识效果的展示,可参考:
Model Validation
关于本文的实例,大家可从下面链接中下载整理好的版本:
MATLAB参数辨识的小例子