仿真平台:Matlab 2019b 实时编辑器(旧的版本好像没有这几个路径规划函数) 机械臂路径点跟踪有几个基本方法:三阶多项式拟合,五阶多项式拟合以及抛物线拟合(理论来自于《机器人学导论》作者:Jhon J.Craig,这里不再赘述) 原理都不难,编程难度应该也不大,但是刚好新版本的matlab更新了这几个函数(能拿来用为什么要自己写)因此本节简单介绍这两个路径规划函数的使用:
- 三阶路径规划:cubicpolytraj
- 五阶路径规划:quinticpolytraj
1.三阶多项式规划函数
%假设是个二维机器人,关节空间下,关节(q1,q2)从(0,1)运动到(0,2),再到(2,4)
wpts = [0 0 2;1 2 4];
%初始时间是0s,终点时间是2s
tpts = [0:2];
%仿真所用的时长为2s,仿真时间间隔为0.01s
tvec = 0:0.01:2;
%利用三阶多项式进行路径规划,得到的结果是规划出来的路径q,速度qd,加速度qdd,已经三阶多项式的全部系数pp
[q, qd, qdd, pp] = cubicpolytraj(wpts, tpts, tvec);
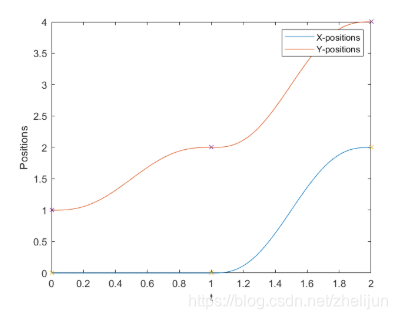
%看看规划出来的路径q1 与q2
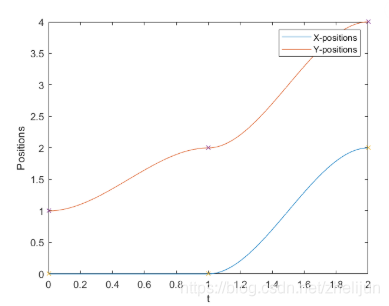
plot(tvec, q)
hold all
%看三个waypoints,用小叉表示,不是字母x
plot(tpts, wpts, 'x')
xlabel('t')
ylabel('Positions')
legend('X-positions','Y-positions')
hold off
%看q的速度
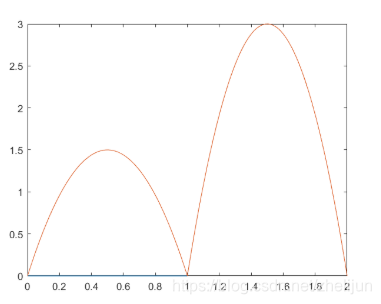
plot(tvec, qd)
%q的加速度
plot(tvec, qdd)
%用2D图看关节空间的整个变化情况
figure
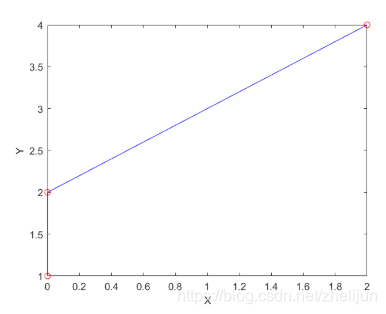
plot(q(1,:),q(2,:),'-b',wpts(1,:),wpts(2,:),'or')
xlabel('X')
ylabel('Y')
仿真结果 q的变化以及各个路径点
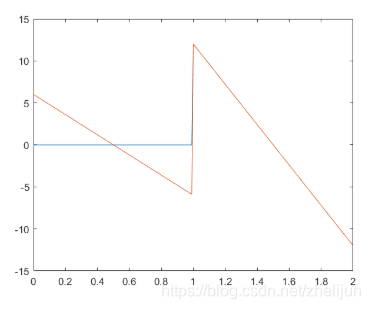
 q的速度
q的速度
 q的加速度
q的加速度
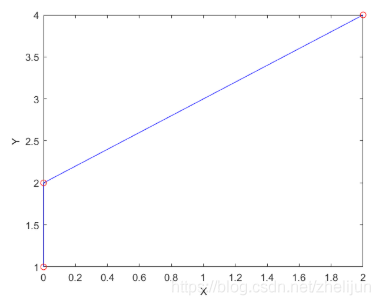
 x y 二维图
x y 二维图
2.五阶多项式路径规划函数
代码跟上面完全一样,只需要改一下路径规划语句对应的函数名
%假设是个二维机器人,关节空间下,关节(q1,q2)从(0,1)运动到(0,2),再到(2,4)
wpts = [0 0 2;1 2 4];
%初始时间是0s,终点时间是2s
tpts = [0:2];
%仿真所用的时长为2s,仿真时间间隔为0.01s
tvec = 0:0.01:2;
%利用三阶多项式进行路径规划,得到的结果是规划出来的路径q,速度qd,加速度qdd,已经三阶多项式的全部系数pp
[q, qd, qdd, pp] = quinticpolytraj(wpts, tpts, tvec);
%看看规划出来的路径q1 与q2
plot(tvec, q)
hold all
%看三个waypoints,用小叉表示,不是字母x
plot(tpts, wpts, 'x')
xlabel('t')
ylabel('Positions')
legend('X-positions','Y-positions')
hold off
%看q的速度
plot(tvec, qd)
%q的加速度
plot(tvec, qdd)
%用2D图看关节空间的整个变化情况
figure
plot(q(1,:),q(2,:),'-b',wpts(1,:),wpts(2,:),'or')
xlabel('X')
ylabel('Y')
仿真结果 q1,q2的变化以及各个路径点
 q的速度
q的速度
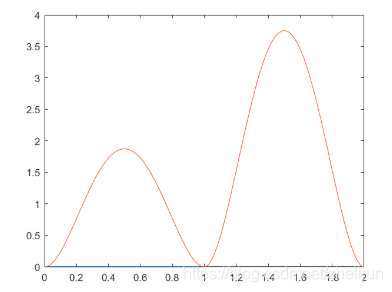 q的加速度
q的加速度
 q1,q2的二维图像
q1,q2的二维图像