机器人动力学建模之牛顿欧拉法推导


推导过程

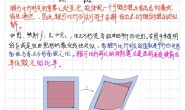
1 问题描述
图中蓝色的物体表示一个刚体,我们选择刚体上的某一点,定义了一个与刚体固连的坐标系B,即本体系。 我们假设刚体可被视作为很多微元的组合,并且假设刚体是均匀的。 最终,我们希望得到外力与刚体相对惯性系的速度和加速度的关系式。
2 符号说明

3 基本原理
第一步,计算刚体的动能。
<code class="has-numbering">动能是个标量,在任何坐标系下表示都相等,但这个动能必须是相对惯性系而言的。 也就是说,速度和角速度必须是相对与惯性系的。 </code>
第二步,动能对速度、角速度求导,得到动量、角动量。
速度可以是表示在{B}系下的,也可以是{S}系下的。如果是相对于表示在{B}系下的速度求导,那么求出来的动量也是表示在{B}系下的。反之亦然。
第三步,动量和角动量对时间求导,得到外力。
这一步的求导需要格外注意。我们需要在惯性系下对时间求导,这样出来的才会是外力。牛顿定律只在惯性系下有效。
如何在惯性系下求导,参考博文[关于机器人运动学与动力学建模的几点领悟](https://blog.csdn.net/handsome_for_kill/article/details/96473701)
4 好戏开始
4.1 计算刚体动能



4.2 计算刚体动量

4.3 计算与合外力的关系
 这篇文章中就不详细推导了,这部分推导可以参见文章:机器人动力学建模之刚体动力学基础学习
这篇文章中就不详细推导了,这部分推导可以参见文章:机器人动力学建模之刚体动力学基础学习





小结
最近学习建模耽误了很多时间,其实这么老的方法,直接把论文里的公式拿来用就OK了,但是我就是控制不住自己,想要把来龙去脉搞清楚。查了很多资料都没有查到,最后只好自己动手。 当然这里也借鉴了很多地方的资料,参考如下: 惯性矩、惯性积、转动惯量、惯性张量 关于机器人运动学与动力学建模的几点领悟 牛顿—欧拉方程 UNDERWATER GLIDERS: DYNAMICS, CONTROL AND DESIGN 最后,希望本文能够对大家有所帮助!