<code class="prism language-cpp has-numbering"></code>
 vins-fusion和vins-mono关于单目和双目的区别,主要体现在特征点的三角化,初始化和重投影误差上。
vins-fusion和vins-mono关于单目和双目的区别,主要体现在特征点的三角化,初始化和重投影误差上。
mono的三角化,是对前一帧和后一帧进行的, fusion的三角化,是对左目和双目进行的。 mono的初始化,非常复杂,先SfM,再与IMU进行松耦合相互标定; fusion的初始化,是在三角化后,再进行一次非线性优化就完成了。 mono的重投影误差,是左目的i,j时刻关于共视点的重投影; fusion的重投影误差,是左目的i时刻和右目的j时候关于共视点的重投影。
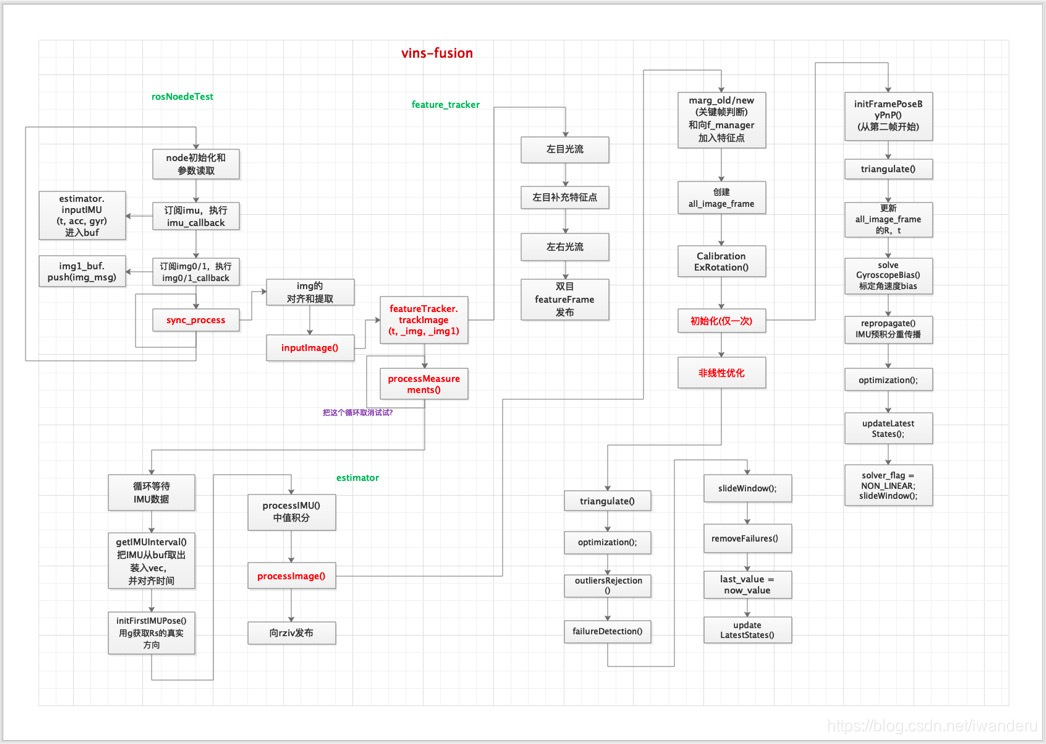
基本上所有的内容都在estimator.cpp。 几个比较印象深刻的的地方。 feature_tracker里面,
并没有对imageConstPtr的时间/频率校准工作,而只是放在img_buf里面; 单目光流跟踪加上了反向光流追踪。
数据预处理,
没有采用messurements这个大的数据结构,而是用了几个小的vec来存放着对齐的数据; 对于边界位置的IMU采用,放弃了被相邻两帧共享的线性插值处理;
processMeasurements:
对于状态量Rs,mono里面初始化是Identity,而在fusion里面,初始化是用acc的平均值与gw对比就获得了相对于先验w系的旋转,通过这个获得Rs[0];
然后初始化区别非常大,
没有construct和IMUvisual align那一些复杂的操作。此时PVQ都是w系的,那么左右双目的位姿也都是w系的,可以直接三角化双目的特征点获得特征点在w系上的坐标和逆深度; 之后就可以通过PnP进一步优化Ps和Rs。 最后非线性优化一下,就结束了。
TODO 而mono里面,能不能也采用一样的方式呢?一开始PVQ都是w系的,scaler也是,然后三角化不同pose,得到一些3D点,然后PnP优化?这样是不是精度就不行了?这是不是fusion双目版比mono版精度低的理由? optimization:
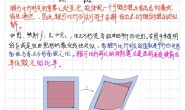
重投影误差用的是不同camera之间的。
<code class="prism language-cpp has-numbering"> <span class="token comment">//左相机在i时刻和j时刻分别观测到路标点</span>
ProjectionTwoFrameOneCamFactor <span class="token operator">*</span>f_td <span class="token operator">=</span> <span class="token keyword">new</span> <span class="token function">ProjectionTwoFrameOneCamFactor</span><span class="token punctuation">(</span>pts_i<span class="token punctuation">,</span> pts_j<span class="token punctuation">,</span> it_per_id<span class="token punctuation">.</span>feature_per_frame<span class="token punctuation">[</span><span class="token number">0</span><span class="token punctuation">]</span><span class="token punctuation">.</span>velocity<span class="token punctuation">,</span> it_per_frame<span class="token punctuation">.</span>velocity<span class="token punctuation">,</span>
it_per_id<span class="token punctuation">.</span>feature_per_frame<span class="token punctuation">[</span><span class="token number">0</span><span class="token punctuation">]</span><span class="token punctuation">.</span>cur_td<span class="token punctuation">,</span> it_per_frame<span class="token punctuation">.</span>cur_td<span class="token punctuation">)</span><span class="token punctuation">;</span>
problem<span class="token punctuation">.</span><span class="token function">AddResidualBlock</span><span class="token punctuation">(</span>f_td<span class="token punctuation">,</span> loss_function<span class="token punctuation">,</span> para_Pose<span class="token punctuation">[</span>imu_i<span class="token punctuation">]</span><span class="token punctuation">,</span> para_Pose<span class="token punctuation">[</span>imu_j<span class="token punctuation">]</span><span class="token punctuation">,</span> para_Ex_Pose<span class="token punctuation">[</span><span class="token number">0</span><span class="token punctuation">]</span><span class="token punctuation">,</span> para_Feature<span class="token punctuation">[</span>feature_index<span class="token punctuation">]</span><span class="token punctuation">,</span> para_Td<span class="token punctuation">[</span><span class="token number">0</span><span class="token punctuation">]</span><span class="token punctuation">)</span><span class="token punctuation">;</span>
<span class="token punctuation">}</span>
<span class="token keyword">if</span><span class="token punctuation">(</span>STEREO <span class="token operator">&&</span> it_per_frame<span class="token punctuation">.</span>is_stereo<span class="token punctuation">)</span>
<span class="token punctuation">{</span>
Vector3d pts_j_right <span class="token operator">=</span> it_per_frame<span class="token punctuation">.</span>pointRight<span class="token punctuation">;</span>
<span class="token keyword">if</span><span class="token punctuation">(</span>imu_i <span class="token operator">!=</span> imu_j<span class="token punctuation">)</span>
<span class="token punctuation">{</span> <span class="token comment">//左相机在i时刻、右相机在j时刻分别观测到路标点</span>
ProjectionTwoFrameTwoCamFactor <span class="token operator">*</span>f <span class="token operator">=</span> <span class="token keyword">new</span> <span class="token function">ProjectionTwoFrameTwoCamFactor</span><span class="token punctuation">(</span>pts_i<span class="token punctuation">,</span> pts_j_right<span class="token punctuation">,</span> it_per_id<span class="token punctuation">.</span>feature_per_frame<span class="token punctuation">[</span><span class="token number">0</span><span class="token punctuation">]</span><span class="token punctuation">.</span>velocity<span class="token punctuation">,</span> it_per_frame<span class="token punctuation">.</span>velocityRight<span class="token punctuation">,</span>
it_per_id<span class="token punctuation">.</span>feature_per_frame<span class="token punctuation">[</span><span class="token number">0</span><span class="token punctuation">]</span><span class="token punctuation">.</span>cur_td<span class="token punctuation">,</span> it_per_frame<span class="token punctuation">.</span>cur_td<span class="token punctuation">)</span><span class="token punctuation">;</span>
problem<span class="token punctuation">.</span><span class="token function">AddResidualBlock</span><span class="token punctuation">(</span>f<span class="token punctuation">,</span> loss_function<span class="token punctuation">,</span> para_Pose<span class="token punctuation">[</span>imu_i<span class="token punctuation">]</span><span class="token punctuation">,</span> para_Pose<span class="token punctuation">[</span>imu_j<span class="token punctuation">]</span><span class="token punctuation">,</span> para_Ex_Pose<span class="token punctuation">[</span><span class="token number">0</span><span class="token punctuation">]</span><span class="token punctuation">,</span> para_Ex_Pose<span class="token punctuation">[</span><span class="token number">1</span><span class="token punctuation">]</span><span class="token punctuation">,</span> para_Feature<span class="token punctuation">[</span>feature_index<span class="token punctuation">]</span><span class="token punctuation">,</span> para_Td<span class="token punctuation">[</span><span class="token number">0</span><span class="token punctuation">]</span><span class="token punctuation">)</span><span class="token punctuation">;</span>
<span class="token punctuation">}</span>
<span class="token keyword">else</span>
<span class="token punctuation">{</span> <span class="token comment">//左相机和右相机在i时刻分别观测到路标点</span>
ProjectionOneFrameTwoCamFactor <span class="token operator">*</span>f <span class="token operator">=</span> <span class="token keyword">new</span> <span class="token function">ProjectionOneFrameTwoCamFactor</span><span class="token punctuation">(</span>pts_i<span class="token punctuation">,</span> pts_j_right<span class="token punctuation">,</span> it_per_id<span class="token punctuation">.</span>feature_per_frame<span class="token punctuation">[</span><span class="token number">0</span><span class="token punctuation">]</span><span class="token punctuation">.</span>velocity<span class="token punctuation">,</span> it_per_frame<span class="token punctuation">.</span>velocityRight<span class="token punctuation">,</span>
it_per_id<span class="token punctuation">.</span>feature_per_frame<span class="token punctuation">[</span><span class="token number">0</span><span class="token punctuation">]</span><span class="token punctuation">.</span>cur_td<span class="token punctuation">,</span> it_per_frame<span class="token punctuation">.</span>cur_td<span class="token punctuation">)</span><span class="token punctuation">;</span>
problem<span class="token punctuation">.</span><span class="token function">AddResidualBlock</span><span class="token punctuation">(</span>f<span class="token punctuation">,</span> loss_function<span class="token punctuation">,</span> para_Ex_Pose<span class="token punctuation">[</span><span class="token number">0</span><span class="token punctuation">]</span><span class="token punctuation">,</span> para_Ex_Pose<span class="token punctuation">[</span><span class="token number">1</span><span class="token punctuation">]</span><span class="token punctuation">,</span> para_Feature<span class="token punctuation">[</span>feature_index<span class="token punctuation">]</span><span class="token punctuation">,</span> para_Td<span class="token punctuation">[</span><span class="token number">0</span><span class="token punctuation">]</span><span class="token punctuation">)</span><span class="token punctuation">;</span>
<span class="token punctuation">}</span>
<span class="token punctuation">}</span>
</code>
<code class="prism language-cpp has-numbering"></code>