本文作者:iwande1.为什么要介绍这个方法? 2018年的时候,D.DeTone等人发表了Self-Supervised Interest Point Detection and Description,提出了一种特征提取……继续阅读 » 5年前 (2021-04-26) 3668浏览 0评论2947个赞
目前网上有很多分析文章,但是都只是一些比较基础的原理分析,而且很多量,虽然有推倒,但是往往没有讲清楚这些量是什么,为什么要有这些量,这些量是从哪来的,也没有刷通整个代码,或者太简练了,对新手不友好。这一次我计划从原理/代码一步步刷通整个VINS,并且说清楚代码中遇到的每一个数据结……继续阅读 » 5年前 (2021-04-26) 3574浏览 0评论1027个赞
各个部分的讲解如下: 【SLAM】VINS-MONO解析——综述 【SLAM】VINS-MONO解析——feature_tracker 【SLAM】VINS-MONO解析——IMU预积分 【SLAM】VINS-MONO解析——vins_estimator 【SL……继续阅读 » 5年前 (2021-04-26) 2090浏览 0评论2275个赞
这个系统是基于香港科技大学飞行机器人组的开源框架VINS-Mono开发的,原开源框架是针对单目SLAM。本双目SLAM系统是在原单目开源框架基础上的二次深度开发,外部接口与原框架一致。这个项目是我的研究课题项目,非商业用途,感谢HKUST的沈老师课题组提供的开源框架。该项目的gi……继续阅读 » 5年前 (2021-04-26) 1772浏览 0评论368个赞
……继续阅读 » 5年前 (2021-04-26) 3329浏览 0评论475个赞
vins-mono刷了三遍,手写vio刷了两遍,SLAM十四讲刷了两三遍,从一开始完全看不懂是啥,不知道什么是SLAM,什么是VIO,什么是VINS,什么是SO3/SE3,甚至不知道什么是IMU…再到自己写总结写攻略,真的有很多感慨。学习开源代码的目的其实就是是为了自己能够去开发……继续阅读 » 5年前 (2021-04-26) 3845浏览 0评论2202个赞
这个工具的作用就是构造一个三维的路标,再根据一系列的pose将这些路标投影到一系列照片上,也就是视频。可以用来进行VO-SLAM的仿真,也很容易拓展为VIO-SLAM的仿真工具。github地址:……继续阅读 » 5年前 (2021-04-26) 2825浏览 0评论2883个赞
opencv2/nonfree的安装 看了好多讲解怎么使用openCV-contrib的nonfree模块的内容,要么整不了,要么太麻烦了,今天花了一下午的时候调试通了,……继续阅读 » 5年前 (2021-04-26) 3431浏览 0评论1540个赞
6.初始化 第一个问题,为什么要初始化? 对于单目系统而言, (1)视觉系统只能获得二维信息,损失了一维信息(深度),所以需要动一下,也……继续阅读 » 5年前 (2021-04-26) 3533浏览 0评论2813个赞
6.2 代码解析 这部分代码在e……继续阅读 » 5年前 (2021-04-26) 2409浏览 0评论1528个赞
7.后端非线性优化 7.1 理论基础 ……继续阅读 » 5年前 (2021-04-26) 3110浏览 0评论2693个赞
7.2 代码 在estimator.cpp的processImage()的最后,代码如下: else//solver_flag = NON_……继续阅读 » 5年前 (2021-04-26) 3735浏览 0评论1082个赞
8.sliding window8.1 理论基础 实际上,这一部分跟后端非线性优化是一起进行的,这一部分对应的非线性优化的损失函数的先验……继续阅读 » 5年前 (2021-04-26) 3530浏览 0评论2637个赞
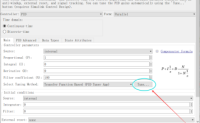
推进器电机模型文件的内容只有一个:推进器推力与PWM波的映射关系。当我们推算得到某时刻该推进器需要提供的推力时,我们需要根据映射关系计算出出对应的PWM波下发给下层以实现控制。不同类型的推进器推力与PWM波的映射关系是不同的,这个有的产品可能会给出,没有的话可能需要自行测定。 &……继续阅读 » 5年前 (2021-04-26) 2813浏览 0评论1991个赞
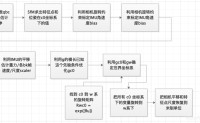
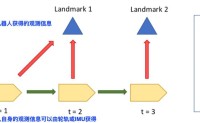
4.IMU预积分 IMU预积分主要干了2件事,第一个是IMU预积分获得α、β、γ值,另一个是误差传递函数的获取。本部分的流程图如下图所示。 ……继续阅读 » 5年前 (2021-04-26) 2391浏览 0评论2282个赞