之前只是简单了解RANSAC模型,知道它是干什么的。然后今天有个课程设计的报告,上去讲了一下RANSAC,感觉这个东西也没那么复杂,所以今天就总结一些RASAC并用Python实现一下直线拟合。 ……继续阅读 » 一三五 5年前 (2021-04-26) 3810浏览 0评论2753个赞
……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2884浏览 0评论856个赞
嘿嘿嘿我回来了! 李群和李代数真的让我头大,做为一个本科生,又不像高博他清华大学本科线性代数就先讲群,我们都是从矩阵起步的。所以很多数学知识真的是从零学起,又夹杂了很多近世代数和抽象代数的知识,就更难以理解了。我不光记录下了学习的笔记还有一些,学到一定地方的感悟。↓……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2970浏览 0评论2839个赞
先讨论滤波器的概念,滤波的意思是,让机器人在某个正确位置上对应的概率越高越好。也就是可以理解为:把错误位置上的概率滤低,把正确位置处的概率滤高。 假设一个机器人小R在如下场景中出现,他刚开始不知道自己在哪(小R还没看到他眼前的门),因此他在这个场景中任……继续阅读 » 郑纯然 5年前 (2021-04-26) 3104浏览 0评论2147个赞
……继续阅读 » iwande 5年前 (2021-04-26) 4015浏览 0评论2911个赞
vins-mono刷了三遍,手写vio刷了两遍,SLAM十四讲刷了两三遍,从一开始完全看不懂是啥,不知道什么是SLAM,什么是VIO,什么是VINS,什么是SO3/SE3,甚至不知道什么是IMU…再到自己写总结写攻略,真的有很多感慨。学习开源代码的目的其实就是是为了自己能够去开发……继续阅读 » iwande 5年前 (2021-04-26) 3324浏览 0评论1681个赞
卡尔曼滤波的理解、推导和应用1. 卡尔曼滤波简介2. 卡尔曼滤波原理3. 卡尔曼滤波的公式……继续阅读 » JOVE 5年前 (2021-04-26) 3214浏览 0评论1810个赞
卡尔曼滤波小记核心思想痛苦的证明预测……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 1869浏览 0评论1521个赞
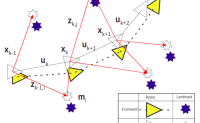
从贝叶斯推断到SLAM的数学模型贝叶斯推断SLAM数学问题简单描述滤波方式……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 3478浏览 0评论2626个赞
机器人动力学建模之牛顿欧拉法推导 ……继续阅读 » 西涯先生 5年前 (2021-04-26) 3054浏览 0评论2891个赞