ur机械臂 + robotiq gripper + robotiq ft sensor + gazebo + 连接真实机械臂 + 网页控制
- 仓库地址:[ur_ws](https://github.com/borninfreedom/ur_ws),欢迎debug和develop。
- xacro制作
- 连接真实机械臂
- gazebo、moveit
- 网页控制
仓库地址:ur_ws,欢迎debug和develop。
xacro制作
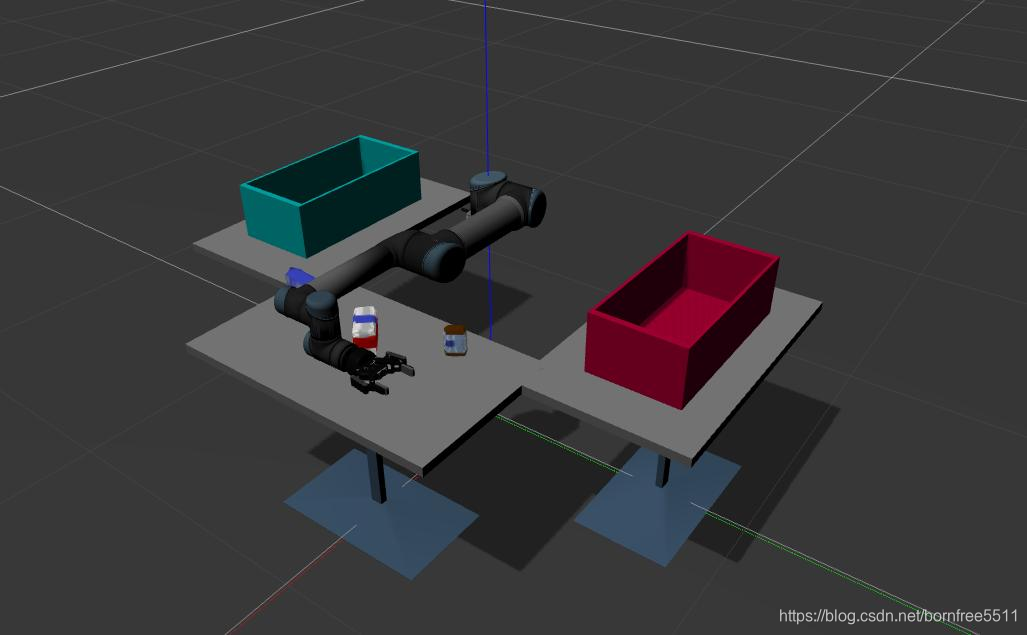
xacro主要负责将ur机械臂、robotiq gripper和robotiq ft sensor装配起来,确保装配正确,供后面生成moveit文件和gazebo仿真使用。 具体讲解请参考:ur机械臂工作空间description的讲解
连接真实机械臂
目前采用的是最新的ur_robot_driver, 关于这个最新驱动的使用,请参考:ROS – 使用UR机械臂最新的 ur_robot_driver。 后面如果有需要,会添加ur_modern_driver的版本,对于笔者使用的机器,是ur3 CB3.12,原版ur_modern_driver有些错误,即使kinetic版本的也会可能执行不过,所以我先提供了一份修改版,确保可以正常执行:ur_modern_driver,选择iron-kinetic-devel,对于git clone到本地的,直接执行 git checkout -b iron-kenetic-devel 即可切换到iron-kinetic-devel分支。
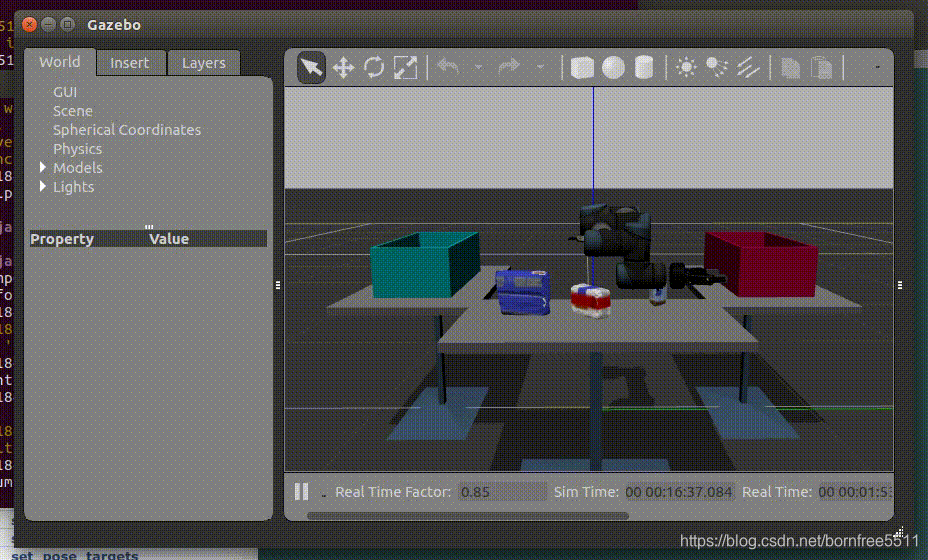
gazebo、moveit
这部分代码不多,也基本固定,请阅读源码。
网页控制
请移步ros网页控制机械臂




