描述机械臂末端的位姿是p时,不想沿着基坐标系来移动,而是想沿着末端的xyz轴来移动接口代码核心函数# 移动def move_……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 2336浏览 0评论2113个赞
Dijkstra算法Dijkstra算法是从一个节点到区域各节点的最短路径算法,解决的是最短路径问题。特点:以起点为中心,向外层层扩展,直到扩展到终点为止。……继续阅读 » 二进制人工智能 5年前 (2021-04-26) 3243浏览 0评论1128个赞
目的 对AGV循迹过程进行分析,探讨轨道对AGV性能的要求,为设计参考轨道提供指导。 AGV……继续阅读 » robinvista 5年前 (2021-04-26) 2830浏览 0评论383个赞
Aster(A*)算法Aster算法是在Dijkstra算法基础上发展出来的,是在静态路径中用于求解最优路径有效的直接搜索算法,比dijkstra算法多了一个启发式的搜索函数,也就是通过一个代价函数来确定搜索方向(从起点开始向周围扩张,通过代价函数,计……继续阅读 » 二进制人工智能 5年前 (2021-04-26) 3390浏览 0评论1582个赞
描述C++求解AX = XB以下的两个代码,虽然可以直接运行,但是我本人使用它们得到的手眼矩阵,旋转矩阵R值的大小看起来是合理的,但位置向量t的三个数值大概都是大于10万的,显然是错误的。但没有时间去研究错误的原因,但是……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 1998浏览 0评论2760个赞
描述使用matlab求解AX=XB的问题可以正确求出X的值,我已经成功验证了至于说X具体代表什么,要结合你自己推导出的公式AX=XB之中,A、X、B分别代表什么代码main.……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 1929浏览 0评论1494个赞
文章目录1 三维空间中的位置与姿态1.1 位置描述1.2 姿态描述2 相关函数详细用法……继续阅读 » 二进制人工智能 5年前 (2021-04-26) 1823浏览 0评论111个赞
本人为了对比研究三大经典SLAM算法(Gmapping、Cartographer、Hector)的优缺因此考虑在Turtlebot3仿真环境下对这三个SLAM算法进行测试。没想到测试第一个算法(Google的cartographer)就花……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 2253浏览 0评论707个赞
描述本文将简要介绍机械臂手眼标定原理及相关知识,包会基础知识了解手眼标定原理,就必须先了解一句话,叫做……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 3100浏览 0评论1781个赞
目的……继续阅读 » robinvista 5年前 (2021-04-26) 1976浏览 0评论2095个赞
一、前言该篇为本文的重点,主要内容为cartographer_turtlrbot3源码库的安装二、cartographer_turtlebot源码库安装这里基本参考创客智造的安装教程,但是由于教……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 2116浏览 0评论1946个赞
……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 1780浏览 0评论2499个赞
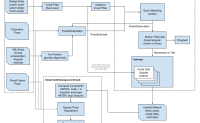
*转载请注明出处 @梦凝小筑1.2 Cartographer 源码软件结构 Cartographer 的源码中,主要有两大部分:&n……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 2089浏览 0评论1257个赞