借助ROS的工具箱让turtlebot在gazebo中运行起来. Part 1.1: 让turtlebot跑起来  ……继续阅读 » 5年前 (2021-04-26) 3440浏览 0评论1630个赞
我们已经在gazebo中实现了机器人的仿真,而且能够控制机器人的运动, 查看机器人所感知到的信息, 包括lasercan, 图像信息, 深度信息, 点云, 也包括没有提到的速度信息. 这里,我们建立用ROS navig……继续阅读 » 5年前 (2021-04-26) 2261浏览 0评论1548个赞
要建立自己的自主机器人,首先,必须要建立自己的机器人模型,URDF(Unified Robot Description Format)模型。 ……继续阅读 » 5年前 (2021-04-26) 3551浏览 0评论1863个赞
在建立好自己的机器人模型后, 我们可以利用turtlebot的ROS库,实现自己机器人的自主导航. ……继续阅读 » 5年前 (2021-04-26) 2312浏览 0评论1326个赞
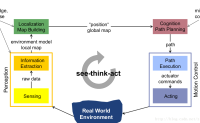
目前为止, 我们都旨在构建一个能够自主运行的机器人,这个就研究方向更加合理的名词应该叫自主移动机器人. 推荐一本个人觉得很不错的书 Ro……继续阅读 » 5年前 (2021-04-26) 3359浏览 0评论1272个赞
使用eigen库进行空间变换 在三维空间中,常常需要变换当前机器人的位姿计算定义的绝对坐标系和当前机器人所处相对坐标系之间的关系。而主要的变换则是平移和旋转,有时候可能需要尺度变换,那么就可以描述为: &nb……继续阅读 » 5年前 (2021-04-26) 2164浏览 0评论1793个赞
PointCloud 点云处理方法总结(代码案例版) 本文将自己在点云处理过程中,遇到的一些常用的具体方法进行总结,不介绍点云数据处理的基本概念,主要是处理过程中的代码总结……继续阅读 » 5年前 (2021-04-26) 2155浏览 0评论2647个赞
目录目录ROS 传感器消息ROS 传感器消息之Laserscan……继续阅读 » 5年前 (2021-04-26) 3537浏览 0评论2588个赞
问题 把模型放到home目录下的~/.gazebo中,gazebo就会自己找到模型的路径,自动链接. 但是常常我们的project在不同的平台运行时依然需要重新将模型拷贝一次,我常常会觉得很苦恼,直接在同一个project中会带来很大便利. &nb……继续阅读 » 5年前 (2021-04-26) 2640浏览 0评论2183个赞