在开发ROS项目中我们常常想实现电脑开机以后自动运行一些节点,这里就涉及到了Ubuntu中的一些开机自启动问题,ROS节点的启动与其他脚本的自动运行不一样,不能只写使用rc.local的方式写入,这是因为在那个时候,bash环境还没启动,因此加载不了ROS环境,从而导致启动ROS……继续阅读 » 21小时前 2969浏览 0评论400个赞
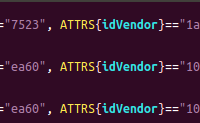
平台:ubuntu18.04、TX2、Python3.6 写在前面 目前经过测试TX2上是带有串口通讯驱动的,我们只需要设置一下即可。本次主要讲解如何使用USB转RS232的串口通讯。 由于USB转RS232可使用不同的芯片,自然包含各种各样的驱……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2197浏览 0评论1661个赞
摘要 由于机器人SLAM、自动导航、语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码;而ROS又是安装在Linux发行版ubuntu系统之上的,先学一些Linux命令行相关的知识,对后续ROS教程的快速上手……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3308浏览 0评论2456个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1773浏览 0评论2842个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2794浏览 0评论691个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2692浏览 0评论607个赞
背景和初衷 小弟是University of Colorado at Boulder的一个在读学生.在ARPG(Autonomous Robotics and Perception Group)实验室学习. 自己当初入门ROS的时候……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2301浏览 0评论1685个赞
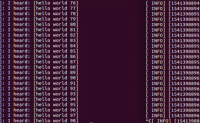
发布接收int类型消息 第一篇文章我们发布接收了string类型的消息.我们提到在ROS里发布的消息必须是在ROS中定义了的.就是如果你要发布一个string类型的消息,你不能直接发布一个std::string,你得发布一个std_msgs::S……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2435浏览 0评论1704个赞
引言 这篇博客介绍的是,如何在windows环境下搭建基于CMake和GCC的开发环境。这里使用的编辑器是VSCode。害怕麻烦的同学不应该搭建这个开发环境,应该直接使用VS Studiao的集成开发环境。 而我之所以要搭建这个环境,是因为为了方便……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3236浏览 0评论141个赞
ROS Noetic Ninjemys是ROS1最具里程碑式的版本!为什么呢? ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2400浏览 0评论1524个赞
新建**.sh文件,写入以下内容: #!/usr/bin/expectset timeout 3spawn ssh username@ipexpect "*password*"send "passwor……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3511浏览 0评论893个赞
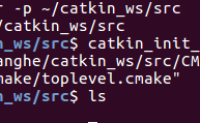
主要知识点: 1.src、build、devel、install各文件夹的功能介绍。 2.创建工作空间(创建文件夹,初始化工作空间)、编译工作空间、设置环境变量,检查环境变量 (echo $ROS_PACKAGE_PATH) 3.创建功能包:cat……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1650浏览 0评论2860个赞
1.话题编程 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3467浏览 0评论1430个赞
一般来说著名的linux系统基本上分两大类:RedHat系列:Redhat、Centos、Fedora等Debian系列:Debian、Ubuntu等Red……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2253浏览 0评论1109个赞
NVIDIA Jetson TX2 编译并启动ttyACM模块平台: TX2 L4T 27.1系统:ubuntu 16.04传感器:hokuyo UTM-30LX laser有两个TX2,第一个连上hok……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3002浏览 0评论702个赞
ubuntu Shell脚本杀死所有用户会话?在Linux中,可以通过各种方式自动执行系统管理员任务。它大大减少了人力,并节省了可用于其他生产任务的合理时间。Shell脚本是使常规作业自动化的方法之一。对于方案,您要运行每周作业或EOD作业以填充一些数据以用于报告目的。为此,您必须在开始作业之前终止当前正在访问系统上的应用程序的所有ssh会话。……继续阅读 » 开心洋葱 5年前 (2021-04-01) 3561浏览 0评论2476个赞
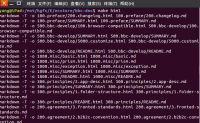
ubuntu 递归批量markdown(md)转html或PDF文件 ubuntu工具安装$ sudo apt-get install discount$ sudo apt-get install python-markdown 使用方法markdown -o Release-Notes.html Re……继续阅读 » 开心洋葱 10年前 (2016-04-30) 3407浏览 0评论1684个赞