1.话题编程
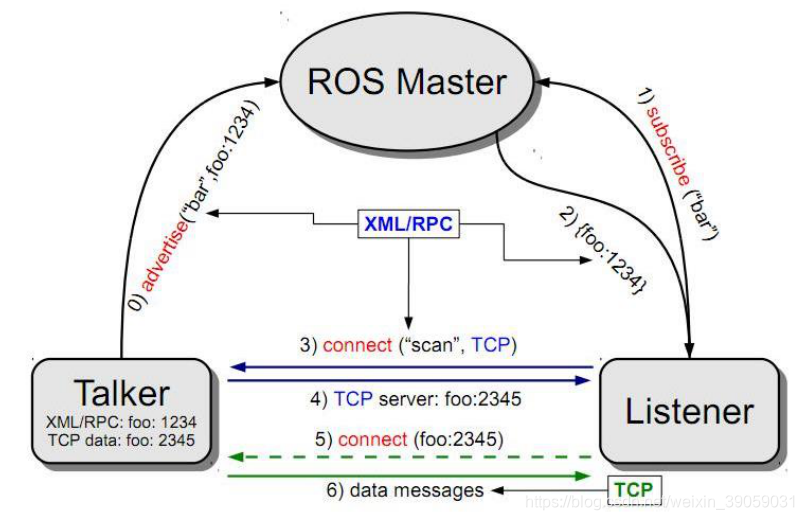 首先我们要有一个发布话题的Talker,还要有一个订阅话题的Listener,然后就是负责管理整个系统的ROS Master。 话题编程的流程主要是以下四个步骤:
首先我们要有一个发布话题的Talker,还要有一个订阅话题的Listener,然后就是负责管理整个系统的ROS Master。 话题编程的流程主要是以下四个步骤:
- 创建发布者
- 创建订阅者
- 添加编译选项
- 运行可执行程序
上面的前两步是编程实现的,第三步是通过编译的方式生成可执行文件。最后一步就是去运行一下这个可执行的程序。 我们之前创建的功能包learning_communication里面是没有代码的:
 然后在这个文件下面创建一个talker.cpp文件
然后在这个文件下面创建一个talker.cpp文件
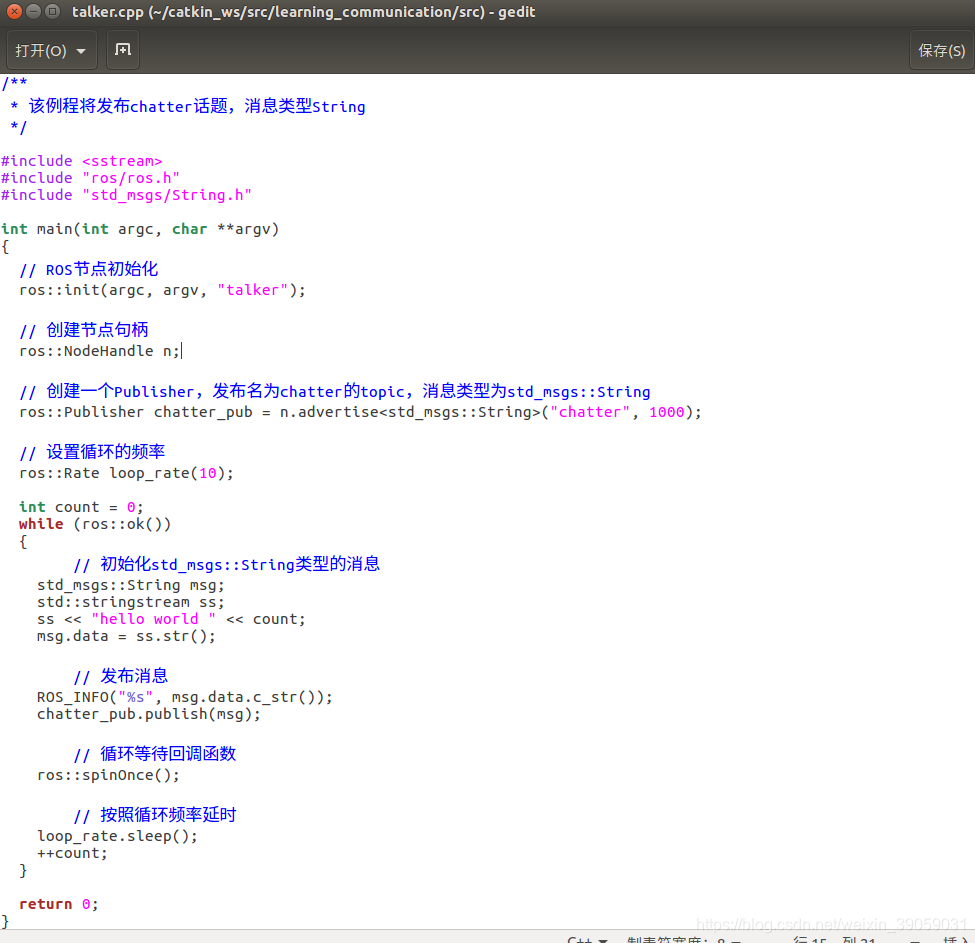 里面的代码解释也非常清晰。通过句柄.advertise发布消息,里面需要传入发布消息的具体类型,以及队列的长度。 代码的流程如下:
里面的代码解释也非常清晰。通过句柄.advertise发布消息,里面需要传入发布消息的具体类型,以及队列的长度。 代码的流程如下:
- 初始化ROS节点
- 向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型。
- 按照一定频率循环发布消息。
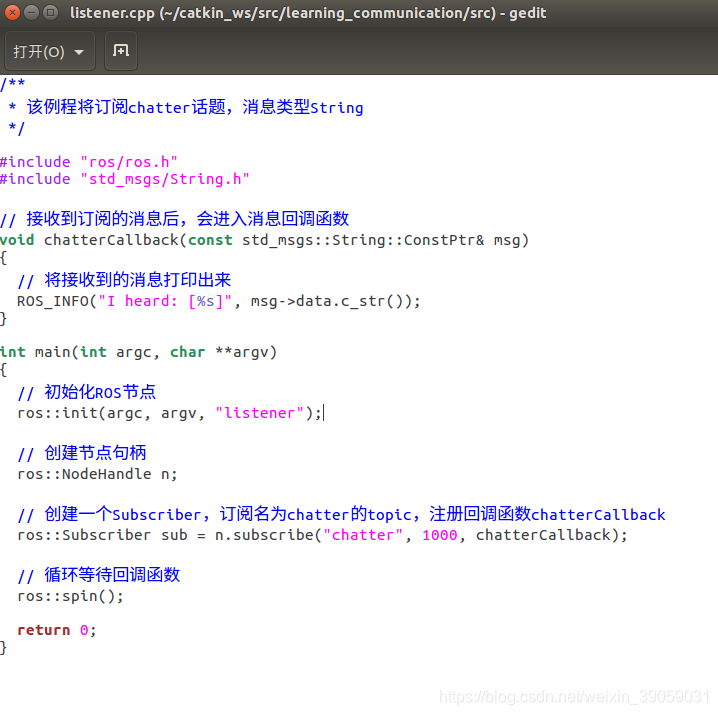
有了发布者之后,我们接下来需要去定义一个订阅者,步骤如下:
- 初始化ROS节点
- 订阅需要的话题
- 循环等待话题消息,接收到消息后进入回调函数。
- 在回调函数里面完成消息处理。
源码如下:
 现在的话我们就已经写好了c++文件,我们需要对其进行编译,如果我们使用的是python文件的话,我们就不用对其进行编译了。编译代码主要有以下三个步骤:
现在的话我们就已经写好了c++文件,我们需要对其进行编译,如果我们使用的是python文件的话,我们就不用对其进行编译了。编译代码主要有以下三个步骤:
- 设置需要编译的代码和生成的可执行文件;
- 设置链接库;
- 设置依赖。
 在上面这个文件夹下面的CMakeLists.txt就是我们具体需要编译的选项的。接下来我们需要在这个文件下面设置我们需要编译的选项。在这个文件里面很多都是被注释掉了,我们很多时候去掉其中的注释然后再改一点就可以了,并不需要我们自己写。将代码生成可执行文件就是需要使用add_executable这个配置。
在上面这个文件夹下面的CMakeLists.txt就是我们具体需要编译的选项的。接下来我们需要在这个文件下面设置我们需要编译的选项。在这个文件里面很多都是被注释掉了,我们很多时候去掉其中的注释然后再改一点就可以了,并不需要我们自己写。将代码生成可执行文件就是需要使用add_executable这个配置。
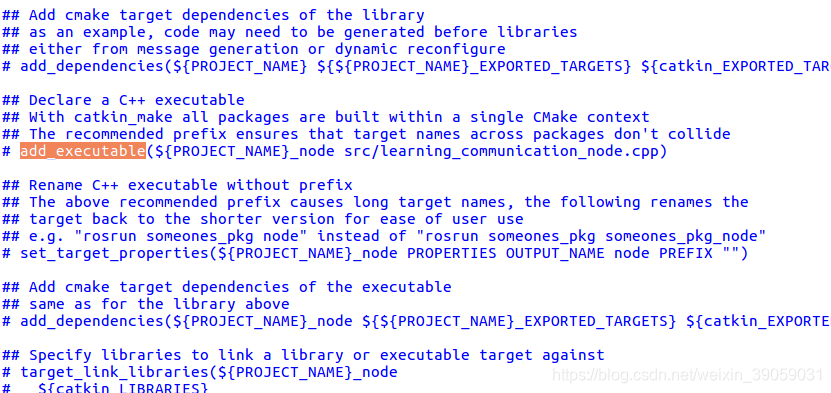 这里我们在下面再粘贴一下:
这里我们在下面再粘贴一下:
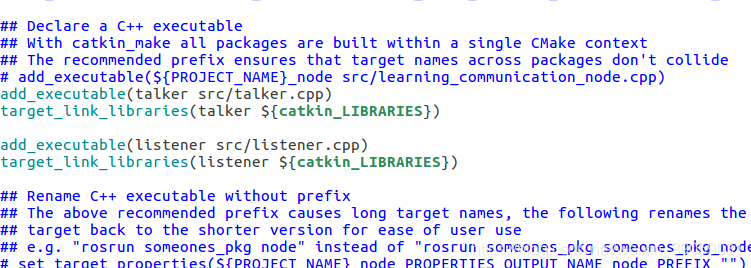 这里我们只需要看未被注释的,第一行的意思就是将talker.cpp生成可执行文件。如果需要更多的文件来生成可执行文件的话,需要在后面再多加几个c++文件。 因为我们需要依赖第三方的库,所以我们需要添加target_link_libraries来与第三方的库做一个链接。之后我们回到工作空间对其进行编译。
这里我们只需要看未被注释的,第一行的意思就是将talker.cpp生成可执行文件。如果需要更多的文件来生成可执行文件的话,需要在后面再多加几个c++文件。 因为我们需要依赖第三方的库,所以我们需要添加target_link_libraries来与第三方的库做一个链接。之后我们回到工作空间对其进行编译。
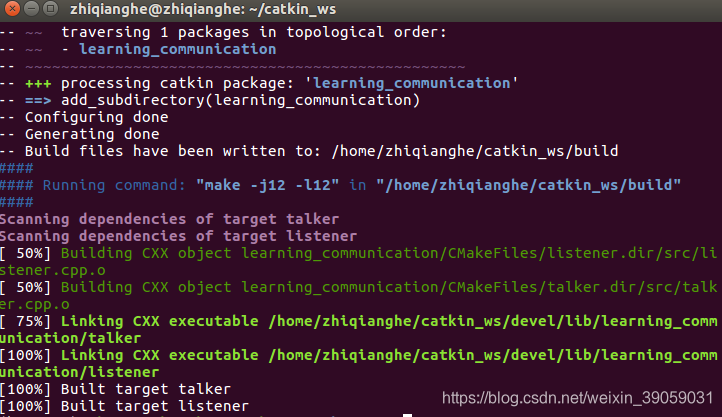
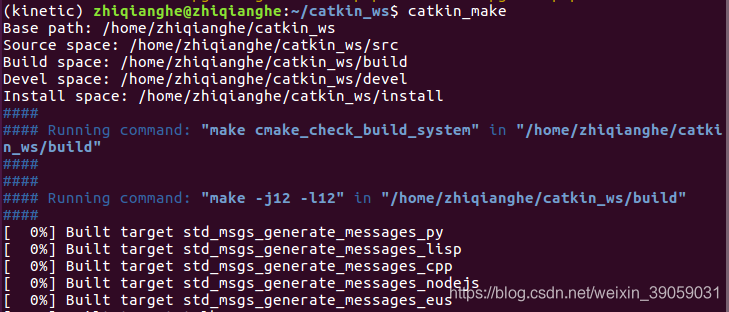
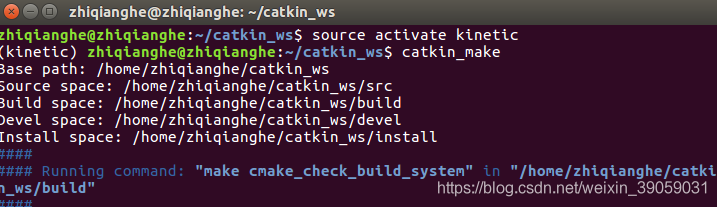 编译成功之后就会有以下提示:显示达到1005并且没有报错的话就说明编译成功了。
编译成功之后就会有以下提示:显示达到1005并且没有报错的话就说明编译成功了。
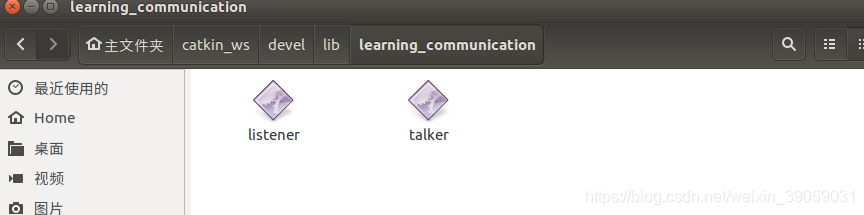
 我们在下面这个文件里面就可以找到我们编译生成的可执行文件了。
我们在下面这个文件里面就可以找到我们编译生成的可执行文件了。
 之后我们启动roscore
之后我们启动roscore
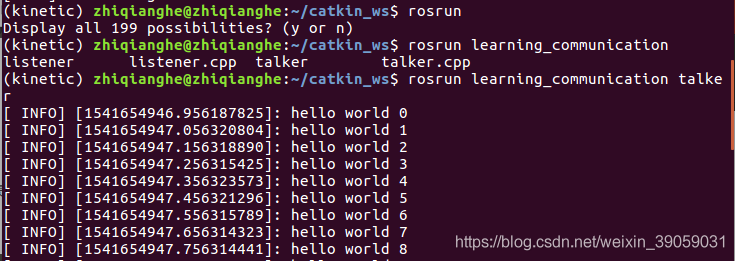
ROS基础-ROS通信编程") 再运行发送“hello world”可执行文件:
再运行发送“hello world”可执行文件:
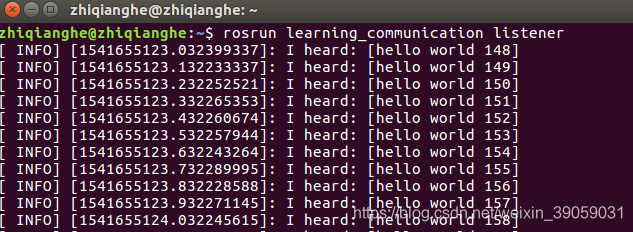
 再运行接收文件的话,就可以看到下面的结果:
再运行接收文件的话,就可以看到下面的结果:
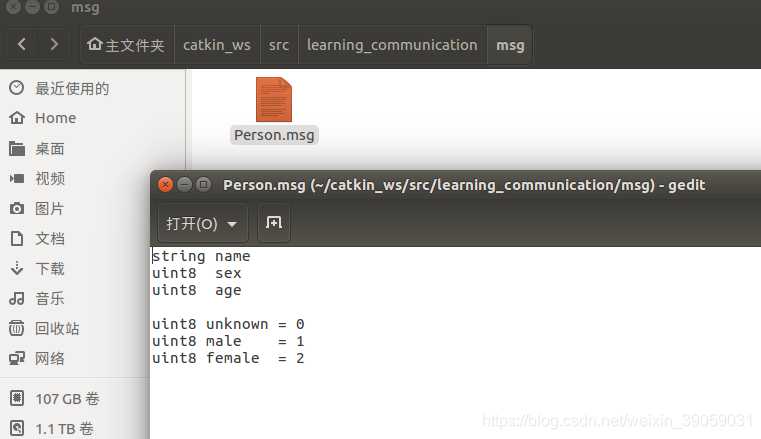
 如果我们需要自己定义话题消息的话,我们可以采取以下方式自定义话题消息: string name uint8 sex unit8 age unit8 unknown = 0 unit8 male = 1 unit8 female = 2 具体操作步骤如下:
如果我们需要自己定义话题消息的话,我们可以采取以下方式自定义话题消息: string name uint8 sex unit8 age unit8 unknown = 0 unit8 male = 1 unit8 female = 2 具体操作步骤如下:
- 定义msg文件
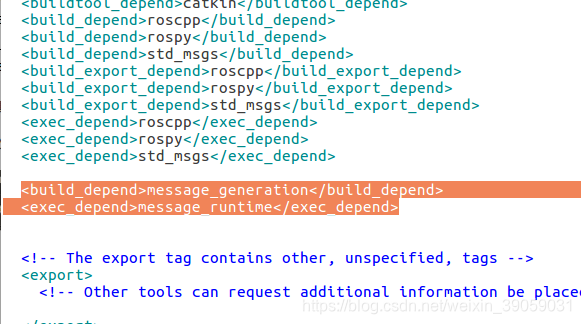
- 在package.xml中添加功能包依赖
<build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend>
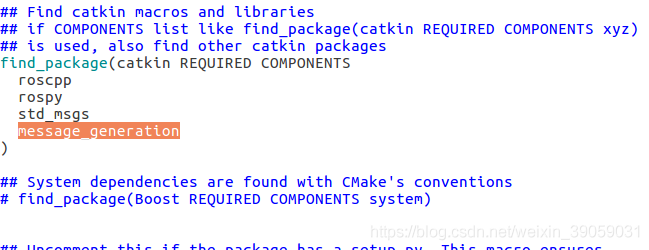
- 在CMakeList.txt添加编译选项
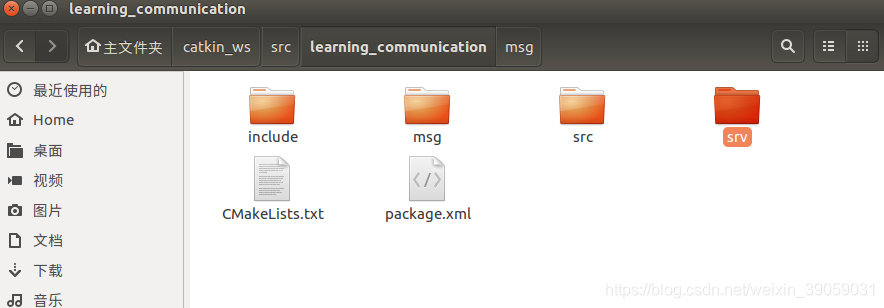
接下来具体操作一下: 首先创建一个文件夹,命名为msg文件
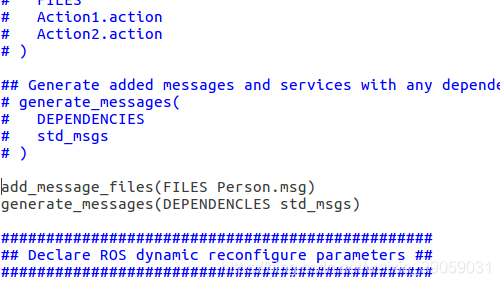
 在这个文件夹下面创建一个具体的Person.msg文件
在这个文件夹下面创建一个具体的Person.msg文件
 之后我们在package.xml文件里面去添加依赖。部分的ROS版本中的exec_depend需要改成run_depend。
之后我们在package.xml文件里面去添加依赖。部分的ROS版本中的exec_depend需要改成run_depend。
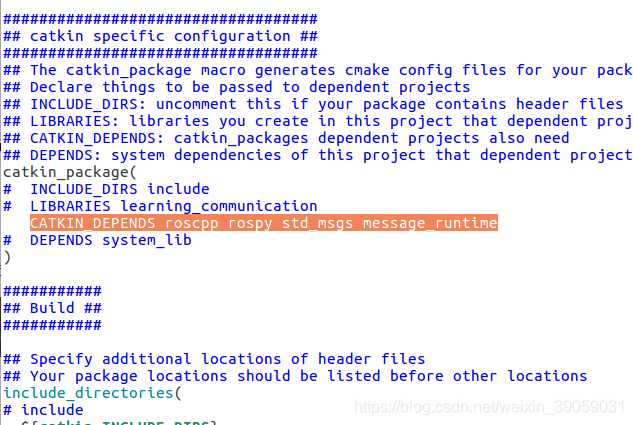
 之后的话我们需要在CMakeLists.txt文件里面添加编译选项,在下面添加message_generation功能包。
之后的话我们需要在CMakeLists.txt文件里面添加编译选项,在下面添加message_generation功能包。
 然后添加编译时候的依赖:
然后添加编译时候的依赖:
 接下来添加是哪一个具体的msg文件:
接下来添加是哪一个具体的msg文件:
 之后对其进行编译:
之后对其进行编译:
 我们可以在代码终端里面验证一下:
我们可以在代码终端里面验证一下:
ROS基础-ROS通信编程")
2.服务编程
listener通过请求的形式来完成跟talker的一个通讯,talker把处理完成之后的数据处理完成之后再发布给listener,整个服务编程流程可以大致分为以下四个步骤:
- 创建服务器
- 创建客户端
- 添加编译选项
- 运行可执行程序
假设如下场景,listener发布某两个加数给talker,talker接收到这两个加数之后将这两个加数进行相加,并且把求和的结果告诉listener。具体步骤如下:
- 定义srv文件
- 在package.xml中添加功能包依赖
- 在CMakeLists.txt添加编译选项
首先创建一个srv文件:
 然后在下面定义以下文件:
然后在下面定义以下文件:
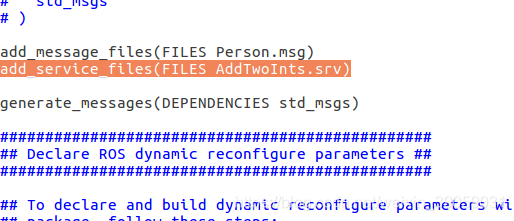
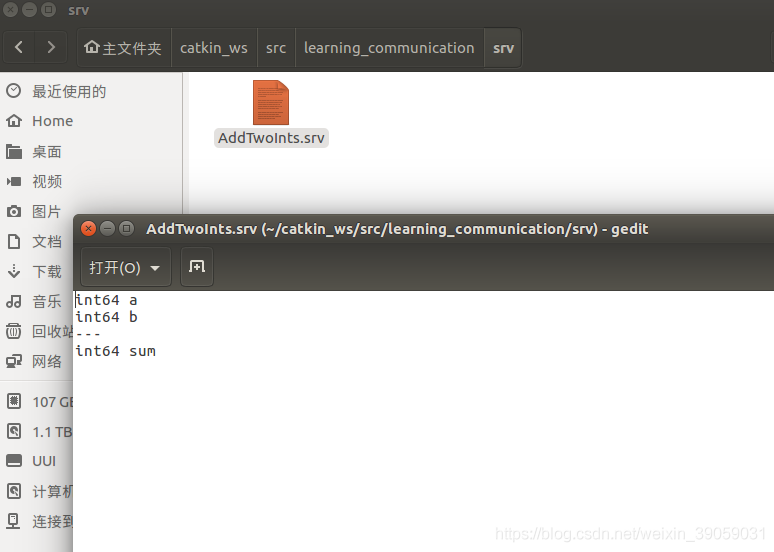 中间的三条横线将数据分成两部分,上面的是服务的请求部分,下面的是服务的应答部分。 之后我们需要在pacaage.xml文件中添加功能包依赖 <build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend> 这个和之前的talker-listener是一样的,因为我们刚才添加好了,这里就不用去做任何修改: 之后修改CMakeLists.txt文件,和之前的也差不多: 首先修改message_generation,和message_runtime。 之后再修改add_service_files:
中间的三条横线将数据分成两部分,上面的是服务的请求部分,下面的是服务的应答部分。 之后我们需要在pacaage.xml文件中添加功能包依赖 <build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend> 这个和之前的talker-listener是一样的,因为我们刚才添加好了,这里就不用去做任何修改: 之后修改CMakeLists.txt文件,和之前的也差不多: 首先修改message_generation,和message_runtime。 之后再修改add_service_files:
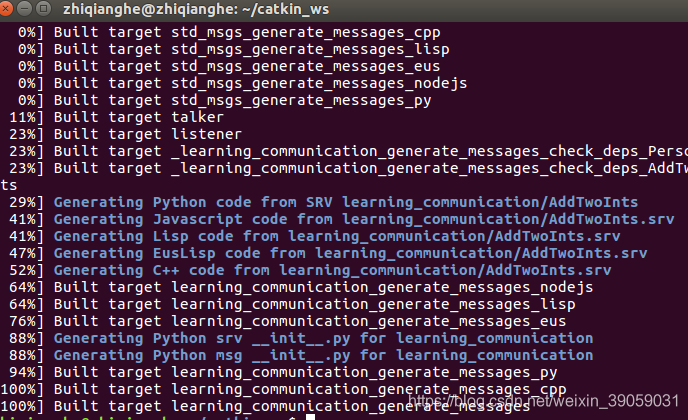
 之后进入工作空间下面,对其进行编译:
之后进入工作空间下面,对其进行编译:
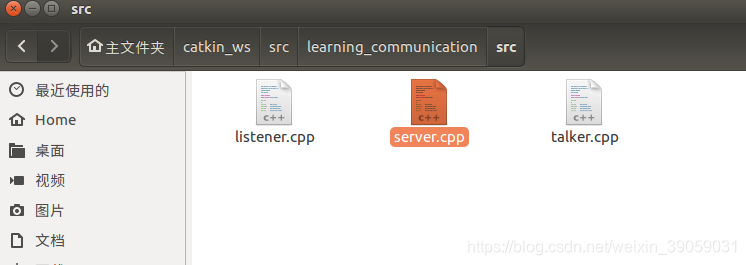
 我们接下来看一下怎么实现一个服务端,实现服务器的编程: 我们在这个功能包下面的src文件夹下面创建一个server.cpp文件:
我们接下来看一下怎么实现一个服务端,实现服务器的编程: 我们在这个功能包下面的src文件夹下面创建一个server.cpp文件:
 一个服务器的实现也需要分成四个步骤:
一个服务器的实现也需要分成四个步骤:
- 初始化ROS节点;
- 创建Server实例;
- 循环等待服务请求,进入回调函数;
- 在回调函数中完成服务功能的处理,并反馈应答数据。
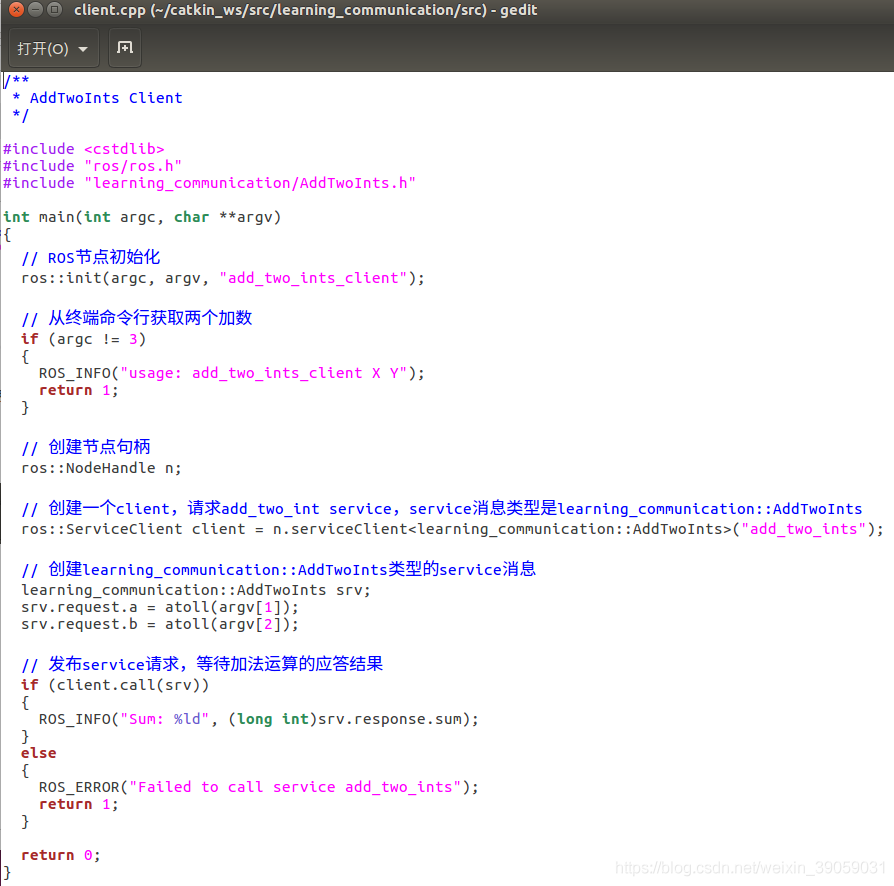
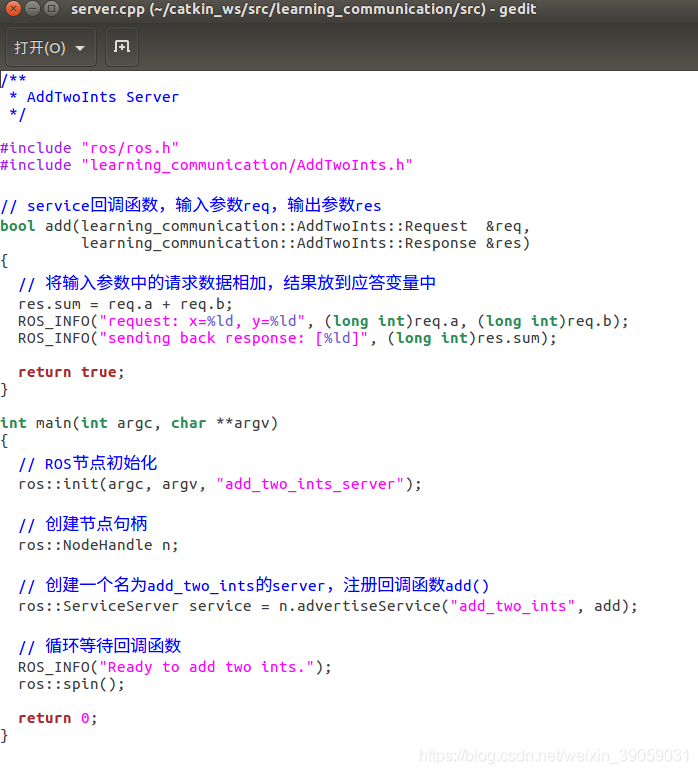 其代码与之前的比较类似。再回调函数里面,由于之前是将数据分成了两个部分,所以这个也是做两个部分,一个是request,一个是response。 之后我们还要创建一个客户端:
其代码与之前的比较类似。再回调函数里面,由于之前是将数据分成了两个部分,所以这个也是做两个部分,一个是request,一个是response。 之后我们还要创建一个客户端:
ROS基础-ROS通信编程") 具体代码如下:
具体代码如下:
 之后需要对其进行编译:
之后需要对其进行编译:
- 设置需要编译的代码和生成的可执行文件;
- 设置链接库;
- 设置依赖;
add_executable(server src/server.cpp) target_link_libraries(server ${catkin_LIBRARIES}) add_dependencies(server ${PROJECT_NAME}_gencpp) add_executable(client src/client.cpp) target_link_libraries(client ${catkin_LIBRARIES}) add_dependencies(client ${PROJECT_NAME}_gencpp)
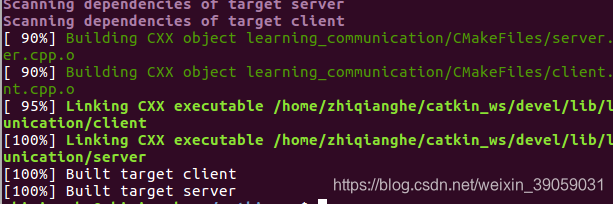
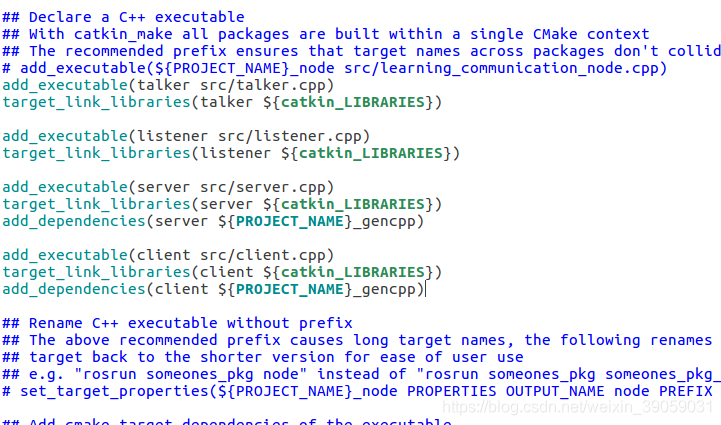 设置完成之后,需要回到工作空间的根目录下面对其进行编译:
设置完成之后,需要回到工作空间的根目录下面对其进行编译:
ROS基础-ROS通信编程")
 接下来我们运行编译成功之后的可执行文件: 首先我们roscore启动master,之后启动服务端,再启动客户端,传入参数:
接下来我们运行编译成功之后的可执行文件: 首先我们roscore启动master,之后启动服务端,再启动客户端,传入参数:
roscore
rosrun learning_communication server
rosrun learning_communication client 1 1
ROS基础-ROS通信编程")
ROS基础-ROS通信编程")
3.动作编程
动作也是话题服务的一种机制,但是跟话题服务又有一些区别。比如说我们想让机器人前往一个目标点,并且让机器人不断地返回自己的实时状态,甚至说在机器人运动过程当中,我们不想让机器人前往这个目标点了,给他发布他一个信息,让它停止下来。像这种需要维持一段时间,并且有反馈的这样一种通讯是没有办法用话题或者服务来完成的。动作的实现也是通过ROS的消息机制来实现的。 实现原理图如下所示:
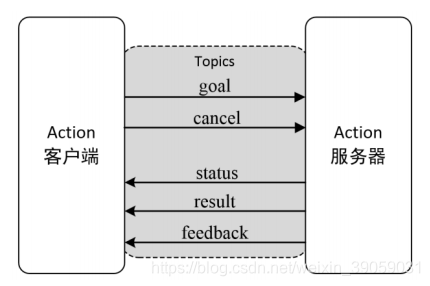
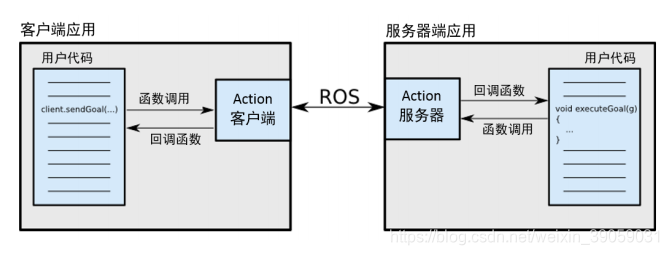 同样也是分为服务端与客户端,通过二者之间的通讯来实现。 Action的接口有:
同样也是分为服务端与客户端,通过二者之间的通讯来实现。 Action的接口有:
- goal:发布任务目标。客户端可以给服务端发送一个动作的目标。
- cancel:请求取消任务。在运行的过程当中,也可以将其取消。
- status:通知客户端当前的状态。通知客户端当前服务器的状态。
- feedback:周期反馈任务运行的监控数据。周期性地反馈,告诉机器人当前服务器的状态。
- result:向客户端发送任务的执行结果,只发布一次。当完成客户端的命令之后会执行一次。
 那么我们如何来实现这样一个具体的动作编程呢:
那么我们如何来实现这样一个具体的动作编程呢:
- 定义action文件
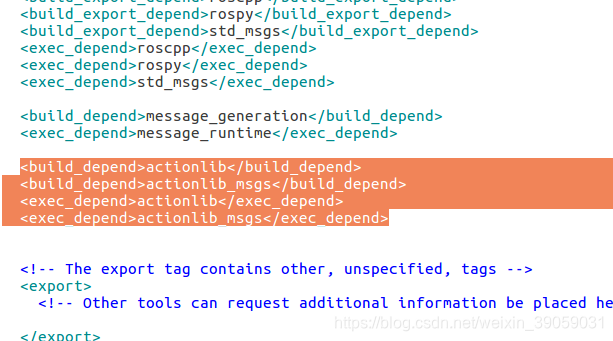
- 在package.xml中添加功能包依赖
<build_depend>actionlib</build_depend> <build_depend>actionlib_msgs</build_depend> <exec_depend>actionlib</exec_depend> <exec_depend>actionlib_msgs</exec_depend>
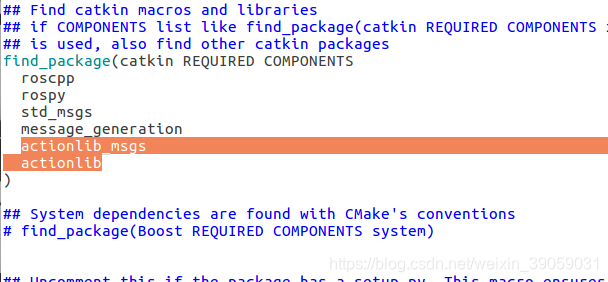
- 在CMakeLists.txt中添加编译选项
find_package(catkin REQUIRED actionlib_msgs actionlib) add_action_files(DIRECTORY action FILES DoDishes.action) generate_messages(DEPENDENCIES actionlib_msgs) 同样,如果ROS中有自定义的工作消息给我们的话我么可以直接调用,如果没有的话那我们就需要自己来定义这样一个自定义的动作消息。 我们现在来假设一个洗盘子这样的任务,客户端发送一个洗盘子的命令给服务端,服务端接收到这个命令之后开始洗盘子,然后反馈给客户端洗了多少了,客户端也可以让服务端终止洗盘子这个命令。盘子洗碗之后返回一个洗碗的信号给客户端。 如果我们想要创建一个动作消息,我们需要在功能包里面创建一个文件夹action。然后在action里面创建具体的动作消息。
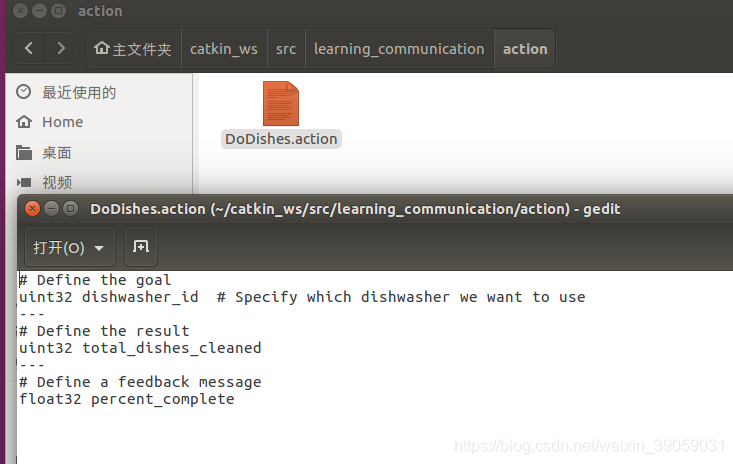 这里有两个三横杠,把这整个数据内容分成了三个部分。 第一部分是定义目标数据的,也就是客户端发送什么样的一个动作的目的给服务端。 第二部分定义的是结果的,也就是说我们整个动作执行完成之后到底是一个什么样的结果。 第三部分是一定周期内反馈给客户端的数据内容。这里的话就是反馈洗盘子的百分比。 定义完成之后需要在package.xml里面去添加功能包的依赖。
这里有两个三横杠,把这整个数据内容分成了三个部分。 第一部分是定义目标数据的,也就是客户端发送什么样的一个动作的目的给服务端。 第二部分定义的是结果的,也就是说我们整个动作执行完成之后到底是一个什么样的结果。 第三部分是一定周期内反馈给客户端的数据内容。这里的话就是反馈洗盘子的百分比。 定义完成之后需要在package.xml里面去添加功能包的依赖。
 package.xml改完之后要去改CMakeLists.txt文件。
package.xml改完之后要去改CMakeLists.txt文件。
ROS基础-ROS通信编程") 之后我们编译一下工作空间,看看定义的这些action是否是正确的
之后我们编译一下工作空间,看看定义的这些action是否是正确的
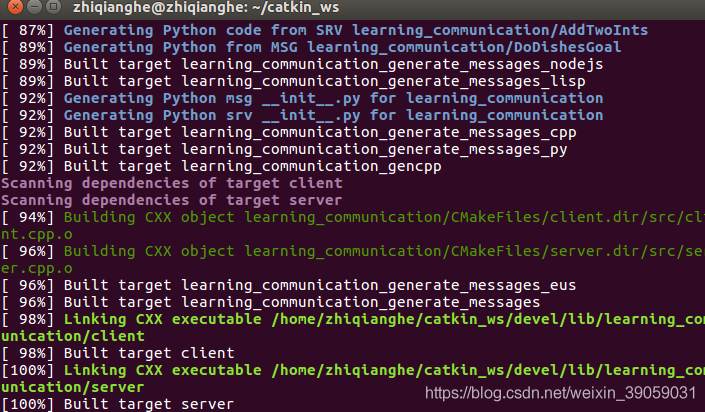 编译是没有错误的,所以我们刚才的操作是没有错误的。 我们现在来看一下如何实现一个动作的服务器,主要是以下步骤:
编译是没有错误的,所以我们刚才的操作是没有错误的。 我们现在来看一下如何实现一个动作的服务器,主要是以下步骤:
- 初始化ROS节点
- 创建动作服务器实例
- 启动服务器,等待动作请求
- 在回调函数中完成动作服务功能的处理,并反馈进度信息
- 动作完成,发送结束信息。
我们从视频资源中把源码拷贝过来:
 我们首先看一下服务端代码:
我们首先看一下服务端代码:
 在main函数里面,程序流程大致都差不多。启动服务器之后服务器就会一直循环等待命令。一旦接收到命令之后,服务器就会进入到回调函数里面。回调函数里面就会开始具体的服务处理。 完成服务端之后我们需要去完成客户端的功能:
在main函数里面,程序流程大致都差不多。启动服务器之后服务器就会一直循环等待命令。一旦接收到命令之后,服务器就会进入到回调函数里面。回调函数里面就会开始具体的服务处理。 完成服务端之后我们需要去完成客户端的功能:
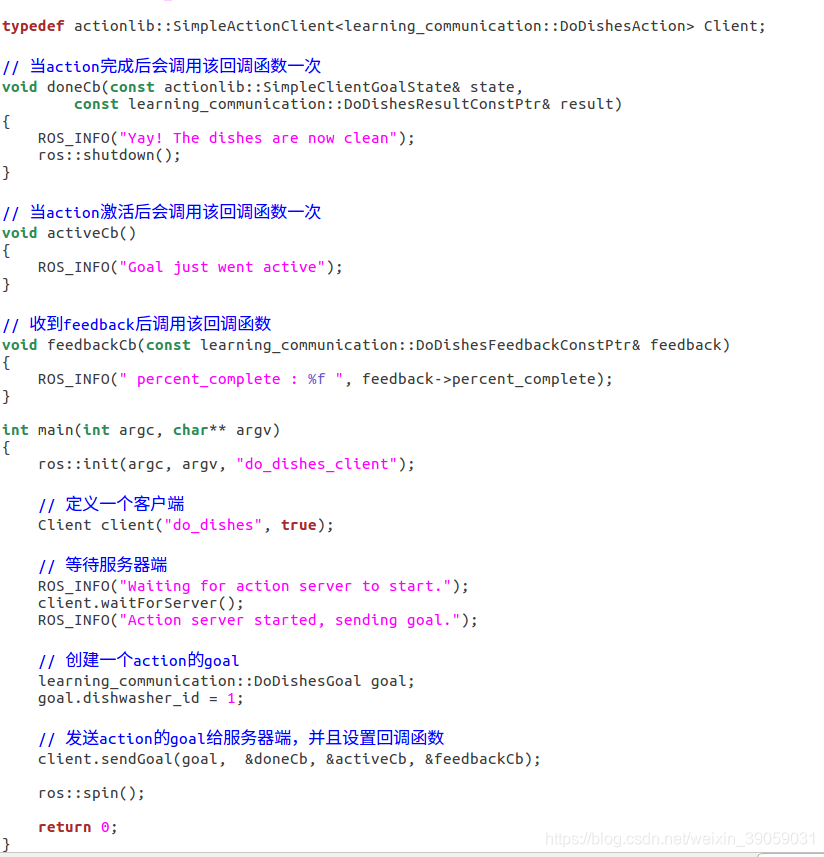
- 初始化ROS节点
- 创建动作客户端实例
- 连接动作服务端
- 发送动作目标
- 根据不同类型的服务端反馈处理回调函数
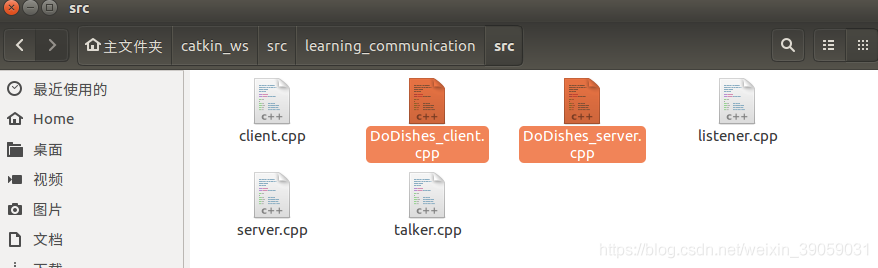
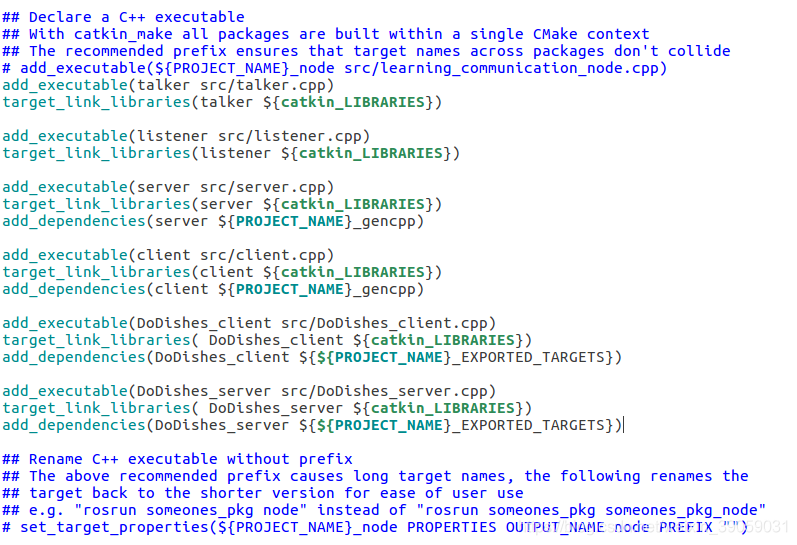
 代码完成之后就是来编译这些代码: add_executable(DoDishes_client src/DoDishes_client.cpp) target_link_libraries( DoDishes_client ${catkin_LIBRARIES}) add_dependencies(DoDishes_client ${${PROJECT_NAME}_EXPORTED_TARGETS}) add_executable(DoDishes_server src/DoDishes_server.cpp) target_link_libraries( DoDishes_server ${catkin_LIBRARIES}) add_dependencies(DoDishes_server ${${PROJECT_NAME}_EXPORTED_TARGETS})
代码完成之后就是来编译这些代码: add_executable(DoDishes_client src/DoDishes_client.cpp) target_link_libraries( DoDishes_client ${catkin_LIBRARIES}) add_dependencies(DoDishes_client ${${PROJECT_NAME}_EXPORTED_TARGETS}) add_executable(DoDishes_server src/DoDishes_server.cpp) target_link_libraries( DoDishes_server ${catkin_LIBRARIES}) add_dependencies(DoDishes_server ${${PROJECT_NAME}_EXPORTED_TARGETS})
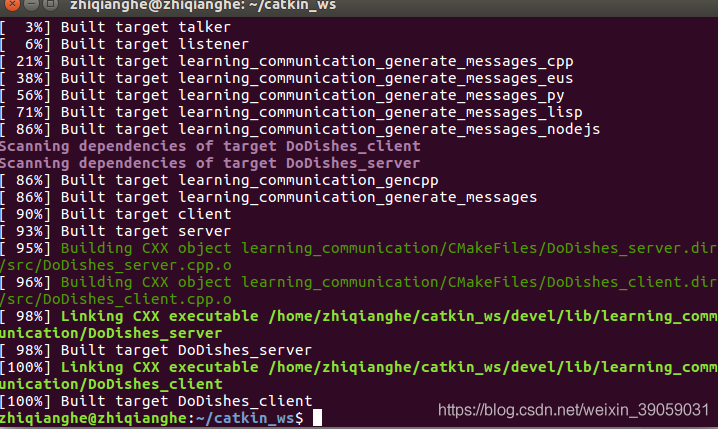
 之后进入工作空间目录下对其进行编译
之后进入工作空间目录下对其进行编译
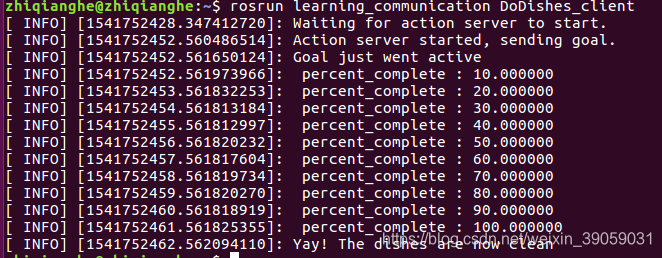
 我们接下来对其进行验证测试:
我们接下来对其进行验证测试:
roscore
rosrun learning_communication DoDishes_client
rosrun learning_communication DoDishes_client
我的微信公众号名称:深度学习与先进智能决策 微信公众号ID:MultiAgent1024 公众号介绍:主要研究强化学习、计算机视觉、深度学习、机器学习等相关内容,分享学习过程中的学习笔记和心得!期待您的关注,欢迎一起学习交流进步!




