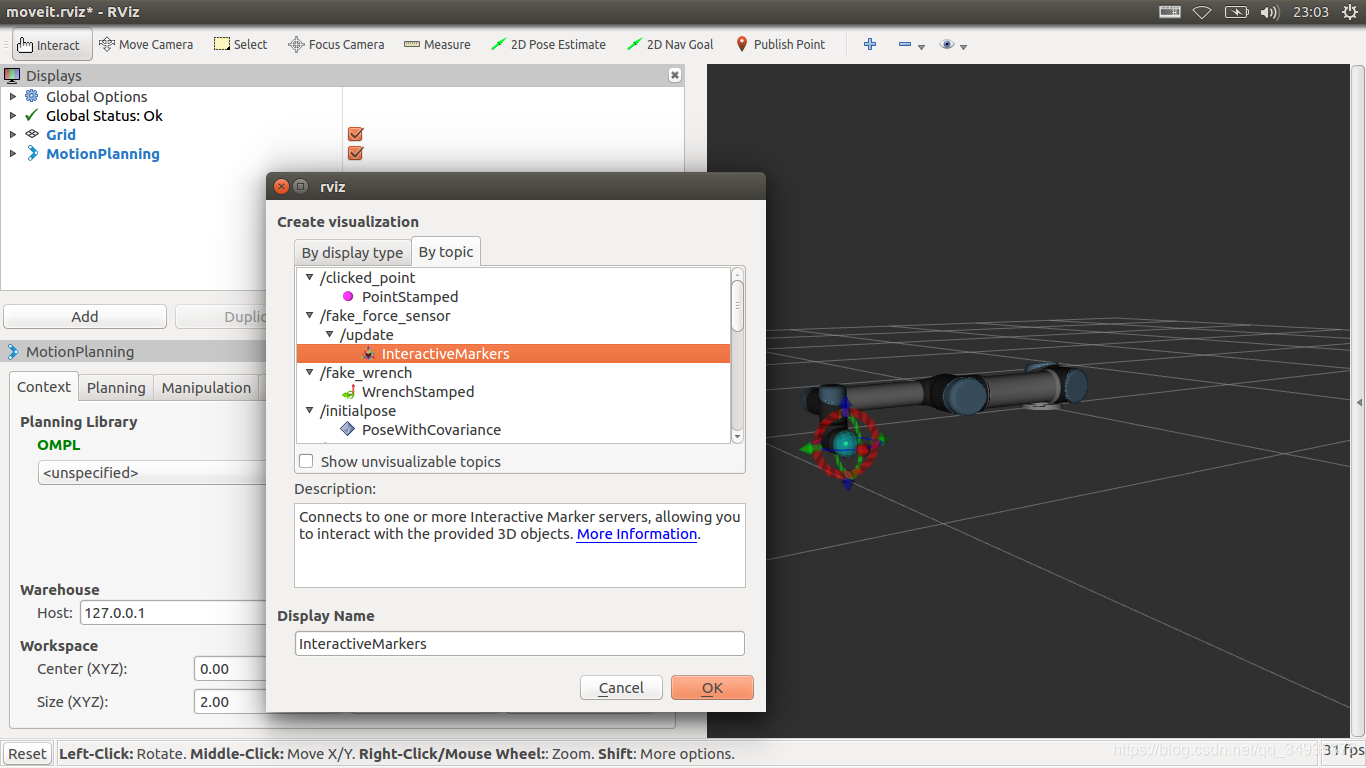
对于机器人的视觉这些信息,很容易在ROS中呈现,但是对于ROS中力和力矩信息的展示,通常在实验室的时候使用真实的机器人和传感器,这个问题不需要考虑,直接读取真实的力和力矩传感器,然后通过ROS消息发布即可。可当疫情导致的有学不能上,有实验室不能去的时候,想在ROS中检验机器人力控制算法的时候,就可以通过一定的方法在RViz中虚拟出力和力矩信息,通过wrench话题发布。 不仅如此,可以通过RViz的InteractiveMarkers插件展现出来力和力矩的交互属性,原始程序来源于 MIT CSAIL的博士后Nadia Figueroa发布在Github上的ros包https://github.com/nbfigueroa (通过issue还和她聊过^ ^)。 我对其进行了简单的修改并将程序单独拿了出来,使其可以用在UR5机械臂的力仿真。
#!/usr/bin/python
import rospy
import copy
import tf
import numpy
from interactive_markers.interactive_marker_server import *
from interactive_markers.menu_handler import *
from visualization_msgs.msg import *
from geometry_msgs.msg import Point
from geometry_msgs.msg import Wrench
from tf.broadcaster import TransformBroadcaster
marker_pose = geometry_msgs.msg.Transform()
listener = None
wrench_pub = None
def publisherCallback( msg ):
try:
listener.waitForTransform("/world", "/fake_force_pose", rospy.Time(0), rospy.Duration(10.0))
(trans1,rot1) = listener.lookupTransform("/world", "/fake_force_pose", rospy.Time(0))
(trans2,rot2) = listener.lookupTransform("/world", "/ee_link", rospy.Time(0))
(trans3,rot3) = listener.lookupTransform("/ee_link", "/world",rospy.Time(0))
# Publish the fake force
fake_wrench = geometry_msgs.msg.WrenchStamped()
trans1_mat = tf.transformations.translation_matrix(trans1)
trans2_mat = tf.transformations.translation_matrix(trans2)
rot3_mat = tf.transformations.quaternion_matrix(rot3)
mat1 = numpy.dot(rot3_mat, trans1_mat-trans2_mat)
force_at_ft_link = tf.transformations.translation_from_matrix(mat1)
# print(marker_pose)
fake_wrench.wrench.force.x = force_at_ft_link[0]
fake_wrench.wrench.force.y = force_at_ft_link[1]
fake_wrench.wrench.force.z = force_at_ft_link[2]
rot = (marker_pose.rotation.x, marker_pose.rotation.y, marker_pose.rotation.z, marker_pose.rotation.w)
euler = tf.transformations.euler_from_quaternion(rot)
fake_wrench.wrench.torque.x = euler[0]
fake_wrench.wrench.torque.y = euler[1]
fake_wrench.wrench.torque.z = euler[2]
fake_wrench.header.frame_id = "/ee_link"
fake_wrench.header.stamp = rospy.Time(0)
wrench_pub.publish(fake_wrench)
except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException):
print "Coudn't find transforms!"
def transformCallback( msg ):
br = TransformBroadcaster()
br.sendTransform((marker_pose.translation.x,
marker_pose.translation.y,
marker_pose.translation.z),
(0,0,0,1),
rospy.Time.now(),
"fake_force_pose",
"world")
def makeBox( msg ):
marker = Marker()
marker.type = Marker.SPHERE
marker.scale.x = msg.scale * 0.02
marker.scale.y = msg.scale * 0.02
marker.scale.z = msg.scale * 0.02
marker.color.r = 0.0
marker.color.g = 1.0
marker.color.b = 0.0
marker.color.a = 1.0
return marker
def makeBoxControl( msg ):
control = InteractiveMarkerControl()
control.always_visible = True
control.markers.append( makeBox(msg) )
msg.controls.append( control )
return control
def processFeedback(feedback, br):
s = "Feedback from marker '" + feedback.marker_name
s += "' / control '" + feedback.control_name + "'"
mp = ""
if feedback.mouse_point_valid:
mp = " at " + str(feedback.mouse_point.x)
mp += ", " + str(feedback.mouse_point.y)
mp += ", " + str(feedback.mouse_point.z)
mp += " in frame " + feedback.header.frame_id
if feedback.event_type == InteractiveMarkerFeedback.BUTTON_CLICK:
# rospy.loginfo(s + ": button click" + mp + ".")
pass
elif feedback.event_type == InteractiveMarkerFeedback.MENU_SELECT:
# rospy.loginfo(s + ": menu item " + str(feedback.menu_entry_id) + " clicked" + mp + ".")
pass
elif feedback.event_type == InteractiveMarkerFeedback.POSE_UPDATE:
# rospy.loginfo(s + ": pose changed")
marker_pose.translation.x = feedback.pose.position.x
marker_pose.translation.y = feedback.pose.position.y
marker_pose.translation.z = feedback.pose.position.z
marker_pose.rotation.x = feedback.pose.orientation.x
marker_pose.rotation.y = feedback.pose.orientation.y
marker_pose.rotation.z = feedback.pose.orientation.z
marker_pose.rotation.w = feedback.pose.orientation.w
elif feedback.event_type == InteractiveMarkerFeedback.MOUSE_DOWN:
pass
# rospy.loginfo(s + ": mouse down" + mp + ".")
elif feedback.event_type == InteractiveMarkerFeedback.MOUSE_UP:
# rospy.loginfo(s + ": mouse up" + mp + ".")
pass
server.applyChanges()
if __name__ == "__main__":
rospy.init_node("fake_force_sensor")
br = TransformBroadcaster()
listener = tf.TransformListener()
wrench_pub = rospy.Publisher('/fake_wrench', geometry_msgs.msg.WrenchStamped, queue_size=4)
# for default trans and rotation same with postion
marker_pose.translation.x = 0.81725
marker_pose.translation.y = 0.19145
marker_pose.translation.z = -0.005491
marker_pose.rotation.x = 0
marker_pose.rotation.y = 0
marker_pose.rotation.z = 0
marker_pose.rotation.w = 1
# Publisher for the topic
rospy.Timer(rospy.Duration(0.02), publisherCallback)
# Publisher for the TF
rospy.Timer(rospy.Duration(0.02), transformCallback)
server = InteractiveMarkerServer("fake_force_sensor")
menu_handler = MenuHandler()
pf_wrap = lambda fb: processFeedback(fb, br)
menu_handler.insert("First Entry", callback=pf_wrap)
menu_handler.insert("Second Entry", callback=pf_wrap)
sub_menu_handle = menu_handler.insert("Submenu")
menu_handler.insert("First Entry", parent=sub_menu_handle, callback=pf_wrap)
menu_handler.insert("Second Entry", parent=sub_menu_handle, callback=pf_wrap)
# for force and torque
# position = Point(0, 0, 0)
# beacause admittance_control config file
# for force to zero
position = Point(0.81725, 0.19145, -0.005491)
int_marker = InteractiveMarker()
int_marker.header.frame_id = "world"
int_marker.pose.position = position
int_marker.scale = 0.3
int_marker.name = "fake_wrench"
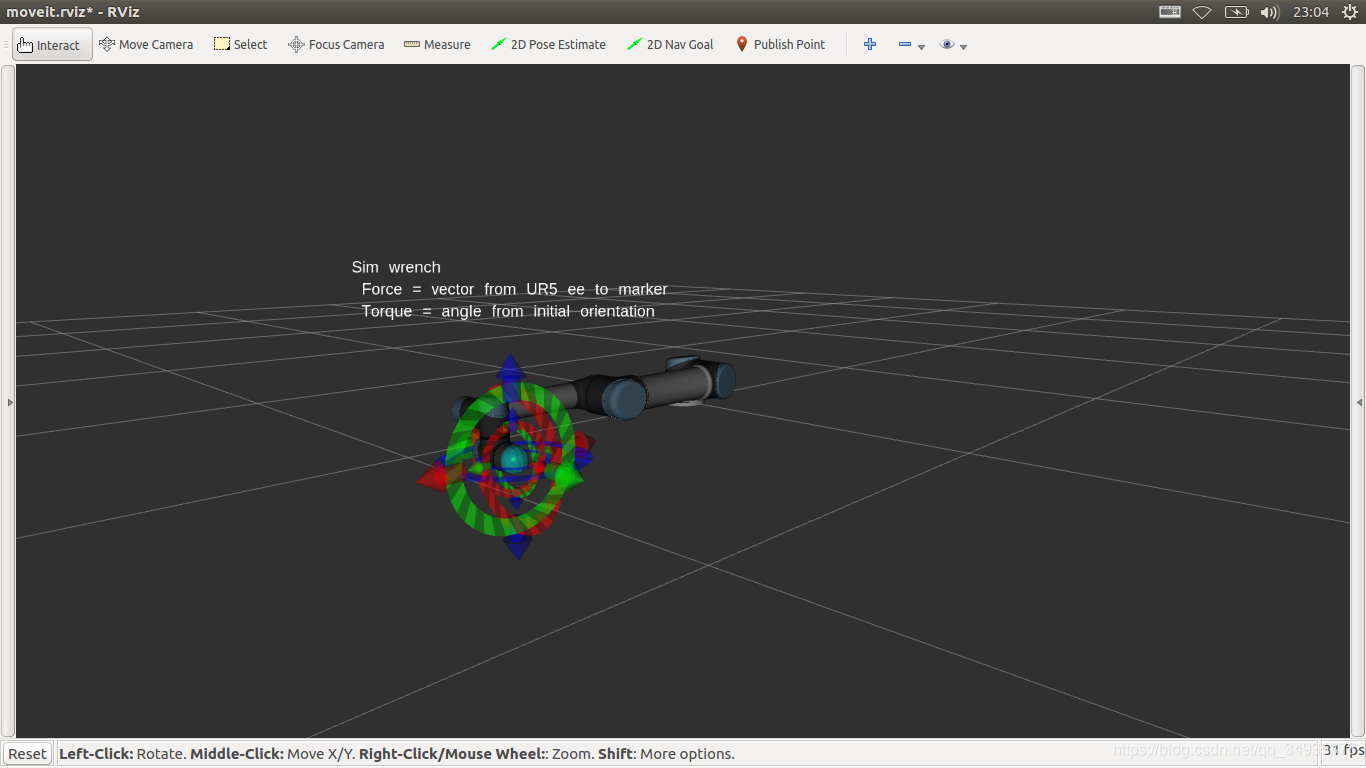
int_marker.description = "Sim wrench \n Force = vector from UR5 ee to marker \n Torque = angle from initial orientation"
# insert a box
makeBoxControl(int_marker)
fixed = False
control = InteractiveMarkerControl()
control.orientation.w = 1
control.orientation.x = 1
control.orientation.y = 0
control.orientation.z = 0
control.name = "rotate_x"
control.interaction_mode = InteractiveMarkerControl.ROTATE_AXIS
if fixed:
control.orientation_mode = InteractiveMarkerControl.FIXED
int_marker.controls.append(control)
control = InteractiveMarkerControl()
control.orientation.w = 1
control.orientation.x = 1
control.orientation.y = 0
control.orientation.z = 0
control.name = "move_x"
control.interaction_mode = InteractiveMarkerControl.MOVE_AXIS
if fixed:
control.orientation_mode = InteractiveMarkerControl.FIXED
int_marker.controls.append(control)
control = InteractiveMarkerControl()
control.orientation.w = 1
control.orientation.x = 0
control.orientation.y = 1
control.orientation.z = 0
control.name = "rotate_y"
control.interaction_mode = InteractiveMarkerControl.ROTATE_AXIS
if fixed:
control.orientation_mode = InteractiveMarkerControl.FIXED
int_marker.controls.append(control)
control = InteractiveMarkerControl()
control.orientation.w = 1
control.orientation.x = 0
control.orientation.y = 1
control.orientation.z = 0
control.name = "move_y"
control.interaction_mode = InteractiveMarkerControl.MOVE_AXIS
if fixed:
control.orientation_mode = InteractiveMarkerControl.FIXED
int_marker.controls.append(control)
control = InteractiveMarkerControl()
control.orientation.w = 1
control.orientation.x = 0
control.orientation.y = 0
control.orientation.z = 1
control.name = "rotate_z"
control.interaction_mode = InteractiveMarkerControl.ROTATE_AXIS
if fixed:
control.orientation_mode = InteractiveMarkerControl.FIXED
int_marker.controls.append(control)
control = InteractiveMarkerControl()
control.orientation.w = 1
control.orientation.x = 0
control.orientation.y = 0
control.orientation.z = 1
control.name = "move_z"
control.interaction_mode = InteractiveMarkerControl.MOVE_AXIS
if fixed:
control.orientation_mode = InteractiveMarkerControl.FIXED
int_marker.controls.append(control)
server.insert(int_marker, pf_wrap)
menu_handler.apply(server, int_marker.name)
server.applyChanges()
rospy.spin()
程序只需要重点关注def publisherCallback( msg ),通过指定markers的中心位置,用ur5末端ee_link到markers的向量来表示力和力矩信息,然后发布在wrench消息上,其中markers的中心位置的初始位置通过主函数中的marker_pose和Point指定,主函数最后的control = InteractiveMarkerControl()赋予markers(力和力矩)交互属性,让我们可以手动调节力和力矩数据大小。
$ roslaunch ur5_moveit_config demo.launch
# 复制代码创建一个ros包
$ rosrun xxx fake_force_torque.py
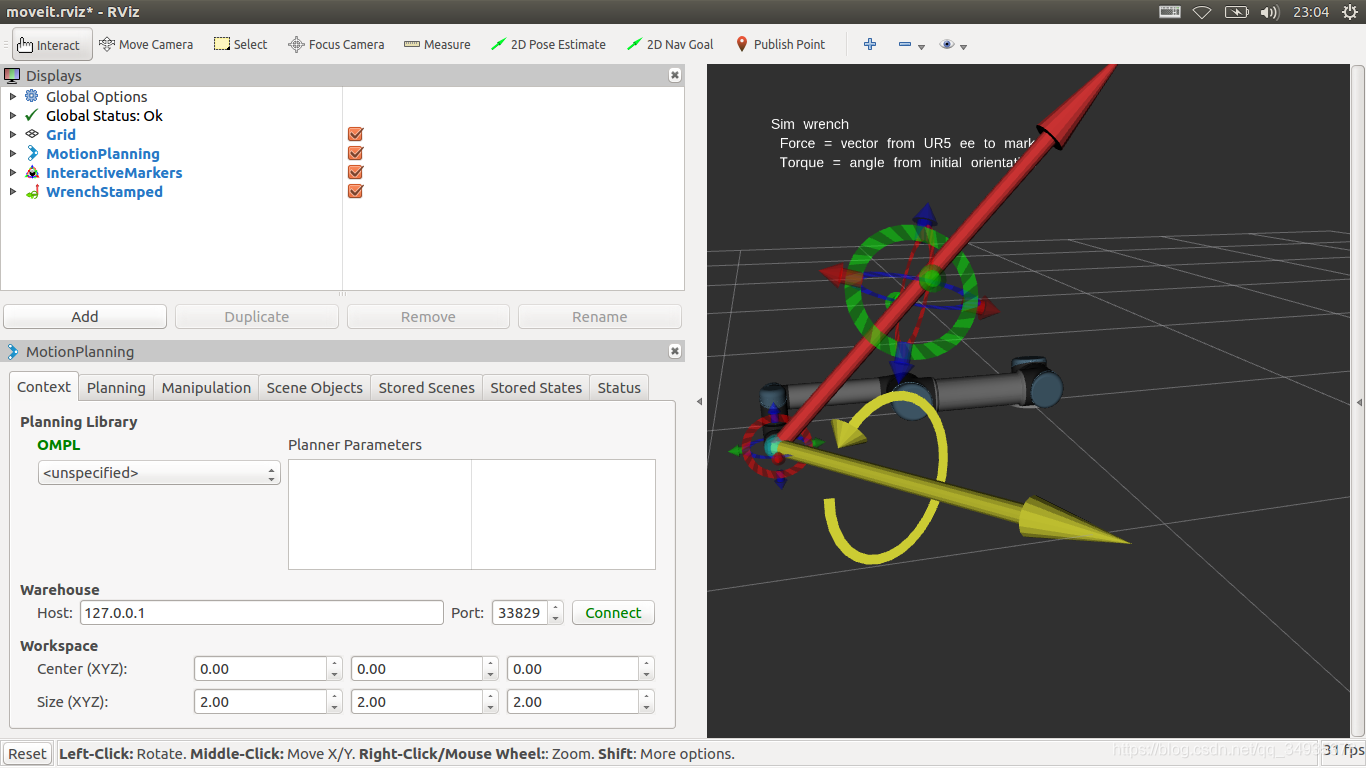
 妙啊!!!
妙啊!!!




