通过视觉传感器赋予机械臂“眼睛”的功能,配合ATI力和力矩传感器,就可以完成机械臂“手眼”结合的能力,完成视觉抓取过程。目前测试的视觉传感器为 ZED mini双目相机,配置安装过程 ……继续阅读 » 5年前 (2021-04-26) 3068浏览 0评论1911个赞
视觉抓取中非常重要的一个部分就是对抓取物体的识别,无论是二维图像还是三维点云,在ROS中都可以找到对应的功能包,本次测试的是能对物体进行快速识别,甚至定位的find_object包,该功能包是基于模板匹配算法(包括彩色图像或点云匹配)。ubunt……继续阅读 » 5年前 (2021-04-26) 3475浏览 0评论1731个赞
控制机械臂的电机有三种: 伺服电机步进电机舵机 1. 本次实验所使用的舵机有两种: LD……继续阅读 » 5年前 (2021-04-26) 2745浏览 0评论342个赞
创建ROS包,包名redwall_arm ,通过自定义的消息,将手柄的数据发布 msg/ joycontrol.msg,内容如下,分别对应罗技手柄的按钮和遥杆轴。 i……继续阅读 » 5年前 (2021-04-26) 2355浏览 0评论1224个赞
###### gazebo配合rviz 仿真机械臂 ####### 一旦机器人有超过6个关节,逆向运动学函数不唯一,可能存在多个解,逆向运动学很难,需要ROS中的逆向运动学包的使用,简化成矩阵的运算对于机械臂而言,需要的是能操作follow_joi……继续阅读 » 5年前 (2021-04-26) 2351浏览 0评论2243个赞
OMPL能做什么? 简单说,就是提供一个运动轨迹。给定一个机器人结构(假设有N个关节),给定一个目标(比如终端移到xyz),给定一个环境,那么OMPL会提供给你一个 轨迹,也就是一个完整的关节位置。沿着这个轨迹依次移动关节,就可以最终把终端移到xyz,当然,……继续阅读 » 5年前 (2021-04-26) 3083浏览 0评论2867个赞
# 开始控制真实世界的机械臂 ####### 我们的目的是使用moveit控制真实的机械臂,而我们真正需要的action是Fol……继续阅读 » 5年前 (2021-04-26) 2441浏览 0评论375个赞
在之前的move_group界面中,当点击plan and execute之后,move_group就会帮我们规划出一条通往指定位姿的轨迹,发布在follow_joint_trajectory上,通过rostopic echo /redwall_arm/fol……继续阅读 » 5年前 (2021-04-26) 2264浏览 0评论2562个赞
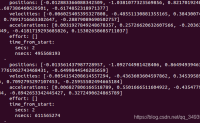
根据之前的配置,我们已经可以通过move_group发送出机械臂各关节运动的轨迹,并且通过三次样条插补的方法,赋予各个关节在特定角度时的速度和加速度,通过启动程序节点可以看到,本次运动规划使用了LBKPIECE算法,并且使用了4线程并行规划,规划时间为3.47875……继续阅读 » 5年前 (2021-04-26) 1599浏览 0评论1837个赞
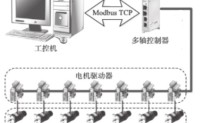
上位机的程序redwall_arm_server.cpp 功能是作为ROS的move_group客户端接收ROS规划的机械臂路点信息,进行三次样条插补获得各个关节或自由度的运动PVAT数据,然后通过TCP通信将处理好的数据发送给下位机的beagle……继续阅读 » 5年前 (2021-04-26) 2864浏览 0评论1860个赞
上一篇博客为了实现延时特定时间(4ms)并在这段时间内产生PWM波形,方法是通过计算PWM的单次循环时间(PWM的周期),然后计算出循环次数,使用计数器计数,每次循环判断计数器的值是否等于循环次数。这种方法比较简单,对于不熟悉PRU 的我来说比较好用,对于只改变占空比不改变周期,……继续阅读 » 5年前 (2021-04-26) 1804浏览 0评论1978个赞
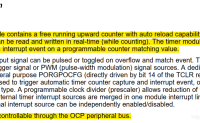
每个PRU都连接着一个OCP主口,它允许访问linux主机设备对应的内存地址。此功能允许PRU控制通用GPIO的输入和输出状态。PRU可访问Linux主机内存,但是访问速度要慢上好几倍,因为内存访问需要路由到外部的PRU-ICSS,在通过PRU-ICSS接口从/OCP从口接收返回……继续阅读 » 5年前 (2021-04-26) 2939浏览 0评论2100个赞
底层的电机控制已经基本完成,还需要解决的最后一个问题就是根据机械臂的运动,将机械臂的位姿状态信息发回到上位机的ROS,让RVIZ中的机械臂和现实中的机械臂保持一致。 目前没有反馈的信息发回到上位机,所以每当点击 Update ,然后Plan and Execute之……继续阅读 » 5年前 (2021-04-26) 3544浏览 0评论1517个赞
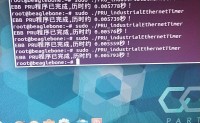
之前的博客为了实现延时特定时间(4ms)并在这段时间内产生PWM波形,使用了两种方法,第一种通过计数的方式,比较low;第二种使用PRU的工业级定时器IEP,时钟频率200MHZ,使用也很简单。 但是随着实验的进行,因为是六自由度的机械臂,计划使用三块beagleb……继续阅读 » 5年前 (2021-04-26) 3128浏览 0评论2754个赞
笛卡尔运动规划Python接口https://blog.csdn.net/qq_32618327/article/details/999669……继续阅读 » 5年前 (2021-04-26) 2107浏览 0评论2486个赞
视觉抓取中非常重要的一个部分就是对抓取物体的识别,无论是二维图像还是三维点云,在ROS中都可以找到对应的功能包,https://blog.c……继续阅读 » 5年前 (2021-04-26) 2048浏览 0评论1490个赞
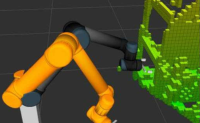
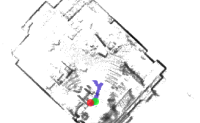
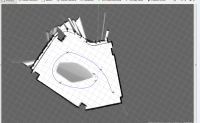
师兄和同门在做SLAM的时候,经常会用到的 octomap ,也就是八叉树地图。octomap相比于点云地图来说大大减小了地图的存储空间。既然octomap可以用于导航和避障,那么自然也可以导入moveit!,作为机械臂路径规划过程中的障碍物,方便机械臂和障碍物之间进行碰撞检测。……继续阅读 » 5年前 (2021-04-26) 2800浏览 0评论2961个赞
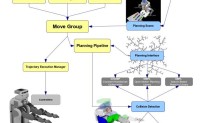
运动规划(Motion Planning):要让一个机器人实现运动规划,需要先将机器人抽象到构形空间(C-Space)。MoveIt就可以帮大家把这些工作给做了,只需提供机器人URDF模型,就可以调用几大运动规划库的规划算法(如OMPL,SBPL……继续阅读 » 5年前 (2021-04-26) 2854浏览 0评论2955个赞
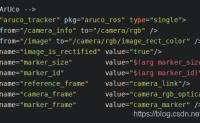
aruco是一种类似二维码的定位标记辅助工具,通过在环境中部署Markers,可以辅助机器人进行定位,弥补单一传感器的缺陷,纠正误差。在之前的手眼标定easy_handeye程序中,需要使用这个工具进行手眼标定。正好手上有realsense深度相机,就根据资料进行了简单的测试。如……继续阅读 » 5年前 (2021-04-26) 3552浏览 0评论1686个赞
对于机械臂视觉抓取功能来说,比较传统的做法:由于之前的物体识别模块已经确定了这片点云对应的物体,如果我们有物体的3D模型,便可以直接用ICP算法将这片点云与物体的3D模型对齐。既然知道3D模型的位姿那就好办了。之后就是各种抓取姿态生成、力封闭之类的东西了。其他方法:利用RCNN在……继续阅读 » 5年前 (2021-04-26) 1999浏览 0评论2279个赞
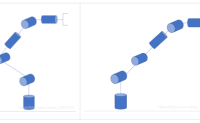
计算正向运动学通常需要使用D-H参数法对机械臂建模。 第一步: 绘制机械臂模型图 可用手绘机械臂结构简图或者模型图,使用圆柱体代表转动关节和线表示的连杆,当写论文的时候,可以使用PPT或者CAD来绘图,ppt里面提供了很多现成的线条形状,通过组合功能可以设计出很ni……继续阅读 » 5年前 (2021-04-26) 2283浏览 0评论1673个赞
通常在机械臂腕部与末端夹持器之间安装六维力传感器,用于机器人在装配过程中的力反馈控制。六维力传感器能够测量三维空间中任何坐标系下的三维力 和三维力矩。 在机械臂处于静态时,机械臂腕部六维力传感器测出的力与力矩数据由三部……继续阅读 » 5年前 (2021-04-26) 3665浏览 0评论187个赞
对于机器人的视觉这些信息,很容易在ROS中呈现,但是对于ROS中力和力矩信息的展示,通常在实验室的时候使用真实的机器人和传感器,这个问题不需要考虑,直接读取真实的力和力矩传感器,然后通过ROS消息发布即可。可当疫情导致的有学不能上,有实验室不能去的时候,想在ROS中检验机器人力控……继续阅读 » 5年前 (2021-04-26) 3183浏览 0评论1152个赞
这里放了一个小强机器人的bag和我自己的bag包,以供大家测试。 链接:https://pan.baidu.com/s/1GF5FNFIKiRV3wbmBH3HwWQ 提取码:668d 前提: 1.需要三维激光启动节点,发布/points……继续阅读 » 5年前 (2021-04-26) 1883浏览 0评论2915个赞
首先,根据不同的雷达,了解雷达发布的点云消息。(IMU也是一样,了解IMU发布的点云topic)。 本文使用的是Robosense 16线激光雷达,暂时未使用IMU(建议6轴,再加上GPS定位精度会高很多)发布PointCloud2类型的消息默认的topic为rslidar_po……继续阅读 » 5年前 (2021-04-26) 1973浏览 0评论1723个赞
大概流程走完,其实还是有点懵逼的,下面就官方文档,讨论下细节,要是我自己没注意到的点。 Validate your bag 如果是准备跑自己的或者别人的bag包,这一步是很有必要的,可以从中获得相关消息的topic和frame_id,这个在填写lua文……继续阅读 » 5年前 (2021-04-26) 3505浏览 0评论988个赞
机器人学中经典教材 《Introduction to Robotics: Mechanics and Control》,也就是John Craig的中文版《机器人学导论》,刚来实验室的时候,就发现师兄们人手一本了,某些章节自己啃也是有点难度的,之 前在 ……继续阅读 » 5年前 (2021-04-26) 1858浏览 0评论2656个赞
正运动学解 ……继续阅读 » 5年前 (2021-04-26) 2861浏览 0评论691个赞
汽车的转向过程就是阿克曼转向。其也是移动机器人的一种运动模式之一。阿克曼基本原理:汽车在行驶过程中(直线和转弯时候),每个车轮的运动估计必须符合他的自然运动轨迹,从而保证轮胎与地面始终处于纯滚动。具有特……继续阅读 » 5年前 (2021-04-26) 3322浏览 0评论2139个赞
传递函数num=[b1 b2 b3 …… bm+1]de……继续阅读 » 5年前 (2021-04-26) 3384浏览 0评论2635个赞