摄像头这种精密仪器对光学器件的要求较高,由于摄像头内部与外部的一些原因,生成的物体图像往往会发生畸变,为了避免数据源造成的误差,需要针对摄像头的参数进行标定。ROS官方提供了用于双目和单目摄像头标定的功能包——camera_calibration。 机器视觉功能包下……继续阅读 » 5年前 (2021-04-26) 2772浏览 0评论417个赞
ROS Kinetic的安装配置请点 环境:Ubuntu 16.04+ROS Kinetic 关于雷达初次尝试……继续阅读 » 5年前 (2021-04-26) 2834浏览 0评论2699个赞
有兴趣的可以看一下ROS Wiki上的介绍: Orbbec Astra Pro介绍 astra_camera包介绍 astra_launch包介绍 功能包下载地址,可以直接用步骤里的git clone 发现一篇好文:https://www.ncnynl……继续阅读 » 5年前 (2021-04-26) 2271浏览 0评论132个赞
rosserial_arduino包可让ROS和ArduinoIDE一起工作 rosserial提供的ROS通讯协议工作在Arduino的UART上,它让Arduino成为标准的ROS节点,可以发布和订阅ROS消息,发布TF转换,获取ROS系统时间。 ……继续阅读 » 5年前 (2021-04-26) 1642浏览 0评论2467个赞
文章目录 准备工作创建Publisher创建Subscriber运行Publisher与Subscri……继续阅读 » 5年前 (2021-04-26) 3338浏览 0评论274个赞
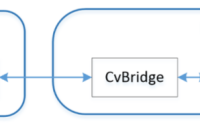
OpenCV库(Open Source Computer Vision Library)是一个基于BSD许可发行的跨平台开源计算机视觉库,可以运行在Linux、Windows和mac OS等操作系统上。OpenCV由一系列C函数和少量C++类构成,同时提供C++、Python、R……继续阅读 » 5年前 (2021-04-26) 2631浏览 0评论1687个赞
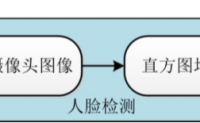
人脸识别需要在输入的图像中确定人脸(如果存在)的位置、大小和姿态,往往用于生物特征识别、视频监听、人机交互等应用中。2001年,Viola和Jones提出了基于Haar特征的级联分类器对象检测算法,并在2002年由Lienhart和Maydt进行改进,为快速、可靠的……继续阅读 » 5年前 (2021-04-26) 1728浏览 0评论986个赞
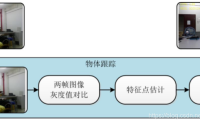
物体跟踪与物体识别有相似之处,同样使用特征点检测的方法,但侧重点并不相同。物体识别针对的物体可以是静态的或动态的,根据物体特征点建立的模型作为识别的数据依据;物体跟踪更强调对物体位置的准确定位,输入图像一般需要具有动态特性。 物体跟踪功能首先根据输入的……继续阅读 » 5年前 (2021-04-26) 2936浏览 0评论611个赞
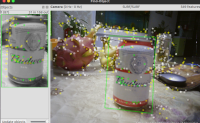
ROS的优点之一是有大量可以在应用程序中重用的软件包。在我们的例子中,想要实现一个物体识别和检测系统。而find_object_2d包(http://wiki.ros.org/find_object_2d)就是一个物体识别和检测的ROS包,它实现了SURF、SIFT……继续阅读 » 5年前 (2021-04-26) 2259浏览 0评论417个赞
由于在树莓派官网下载镜像真的是太慢了,这里给大家百度网盘下载地址: 链接:https://pan.baidu.com/s/1-Qq2DL9PhaIeEP0sJZrGqg 提取码:880u 按正常方式烧录开机就可以了~ 更新源:……继续阅读 » 5年前 (2021-04-26) 3275浏览 0评论2117个赞
目前机器人行业最火的ROS,人工智能/机器学习方面相对较火的tensorflow,两者结合肯定是让机器人锦上添花,功能更加丰富完善。 正好在GitHub上看到了tensorflow的ROS功能包,验证功能包可行性之后,给大家分享一下。 先看一下效果: ……继续阅读 » 5年前 (2021-04-26) 3519浏览 0评论1207个赞
使用xrdp远程连接树莓派Ubuntu mate系统 1) 安装xrdp sudo apt-get install xrdp……继续阅读 » 5年前 (2021-04-26) 2641浏览 0评论1685个赞
比如运行相机节点时出现这个问题而不能显示rgb图像 ……继续阅读 » 5年前 (2021-04-26) 2411浏览 0评论982个赞
ROS是一种分布式软件框架,节点之间通过松耦合的方式进行组合,在很多应用场景下,节点可以运行在不同的计算平台上,通过Topic、Service进行通信。但是ROS中只允许存在一个Master,在多机系统中Master只……继续阅读 » 5年前 (2021-04-26) 2009浏览 0评论675个赞
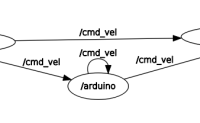
ros_arduino_brige功能包使用和安装这里就不多说了,详情点击 先看一下ros_arduino_b……继续阅读 » 5年前 (2021-04-26) 3577浏览 0评论2780个赞
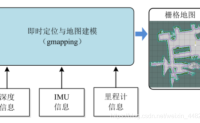
gmapping功能包集成了Rao-Blackwellized粒子滤波算法,为开发者隐去了复杂的内部实现。下图所示的是gmapping功能包的总体框架。 ……继续阅读 » 5年前 (2021-04-26) 3643浏览 0评论1171个赞
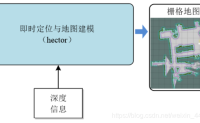
hector_slam功能包使用高斯牛顿方法,不需要里程计数据,只根据激光信息便可构建地图。 所以他的总体框架如下: ……继续阅读 » 5年前 (2021-04-26) 3087浏览 0评论1031个赞
2016年10月5日,谷歌宣布开放一个名为cartographer的即时定位与地图建模库,开发人员可以使用该库实现机器人在二维或三维条件下的定位及建图功能。cartograhper的设计目的是在计算资源有限的情况下,实时获取相对较高精度的2D地图。考虑到基于模拟策略的粒子滤波方法……继续阅读 » 5年前 (2021-04-26) 3000浏览 0评论2488个赞
每当我们需要运行一个ROS节点或工具时,都需要打开一个新的终端运行一个命令。当系统中的节点数量不断增加时,“每个节点一个终端”的模式会变得非常麻烦。那么有没有一种方式可以一次性启动所有节点呢?答案当然是肯定的。 这里我引用古月的书上的内容给大家详细介绍一下。 &nb……继续阅读 » 5年前 (2021-04-26) 2850浏览 0评论848个赞
Astra pro深度相机配置 我发现从github上clone下来的功能包并没有rviz文件 为了显示深度相机的点云图,这……继续阅读 » 5年前 (2021-04-26) 2145浏览 0评论774个赞
环境:Ubuntu16.04 + ROS kinetic 安装joy package joy package为通用的Linux操纵杆提供了ROS驱动,它包括了一个joy_node节点,可以让Linux操纵杆和ROS交互……继续阅读 » 5年前 (2021-04-26) 1686浏览 0评论199个赞
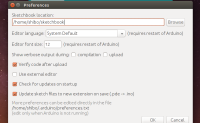
为什么要利用CMake编译代码并上传到arduino? 当需要开发大点的软件项目,Arduino IDE对代码的管理就变得比较笨拙。 如果你经常想要从命令行或能自动完成的eclipse编译代码 最后你可以通过rosserial_client的CMake基础架构,你利用ROS bu……继续阅读 » 5年前 (2021-04-26) 2282浏览 0评论2191个赞