前言 17年参加北邮智能车双车组,18年加入北邮机器人队,19年参加北邮智能车室外光电创意组,感触最深就是北邮机器人队……继续阅读 » 5年前 (2021-04-26) 2409浏览 0评论768个赞
一、前言 上一节:……继续阅读 » 5年前 (2021-04-26) 3152浏览 0评论2461个赞
前言 上一节:……继续阅读 » 5年前 (2021-04-26) 1964浏览 0评论2339个赞
前言 上一节:……继续阅读 » 5年前 (2021-04-26) 2777浏览 0评论860个赞
前言 上一节:……继续阅读 » 5年前 (2021-04-26) 2706浏览 0评论2205个赞
前言 上一节:……继续阅读 » 5年前 (2021-04-26) 2527浏览 0评论463个赞
前言 上一节:……继续阅读 » 5年前 (2021-04-26) 2317浏览 0评论1819个赞
前言 上一节:北邮智能车仿真培训(七……继续阅读 » 5年前 (2021-04-26) 2566浏览 0评论2568个赞
前言 前面的教程基本上是常规组别的,主要用于给大家写下摄像头的算法然后体会下PID,今天的教程是面向室外光电创意组的,……继续阅读 » 5年前 (2021-04-26) 3165浏览 0评论2334个赞
一、前言 操作系统:ubuntu16.04……继续阅读 » 5年前 (2021-04-26) 2152浏览 0评论102个赞
一、先看效果……继续阅读 » 5年前 (2021-04-26) 1642浏览 0评论1694个赞
一、前言 之前的教程使用Python代码实现了四轮车的巡线,阿克曼模型确实在方仿真上效果都好多了,今天教大家将代码从python修改成……继续阅读 » 5年前 (2021-04-26) 2347浏览 0评论1926个赞
前言本文所使用的仿真软件是开源的Rotors包,仅供学习使用!然后这里说明下,只是个人爱好仿真下无人机玩玩,对官方给的无人机控制代码理……继续阅读 » 5年前 (2021-04-26) 2154浏览 0评论1518个赞
前言本节教程演示UUV的一些玩法,基于开源项目UUV,官方介绍文档:……继续阅读 » 5年前 (2021-04-26) 4463浏览 0评论2610个赞
前言本来想直接用百度智能车比赛的数据集训练,但是发现在ROS中搭建红绿灯模型和提供的数据集在颜色亮度外形上都有点差别… …无奈从创建数……继续阅读 » 5年前 (2021-04-26) 2208浏览 0评论948个赞
前言第一节: 基于paddledetecti……继续阅读 » 5年前 (2021-04-26) 3453浏览 0评论333个赞
前言第一节: 基于paddledetecti……继续阅读 » 5年前 (2021-04-26) 3161浏览 0评论2817个赞
前言 今天推出了官方的仿真文件,我也参与了部分仿真模型的设计,提供一个简单的参考思路。 ……继续阅读 » 5年前 (2021-04-26) 2969浏览 0评论1027个赞
前言 上一节教程地址:室外光电仿真教程一 参考教程地址……继续阅读 » 5年前 (2021-04-26) 3331浏览 0评论561个赞
前言 系列教程一:仿真赛教程一<……继续阅读 » 5年前 (2021-04-26) 2580浏览 0评论1809个赞
前言 记录下学习过程,《ros机器人编程实践》第三章第一个例子讲的不是很清楚……继续阅读 » 5年前 (2021-04-26) 1673浏览 0评论2767个赞
前言 《Ros机器人编程实践》第三章例程二定义虚数数据类型。 实现过程 创建工作区参见上一章博客: ros机器人编程……继续阅读 » 5年前 (2021-04-26) 3099浏览 0评论664个赞
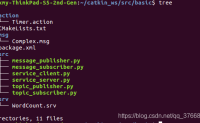
前言 在ros中定义一个服务,计算字符串中单词的数量 ……继续阅读 » 5年前 (2021-04-26) 1719浏览 0评论2417个赞
前言 前面一章已经完成了turtlebot3的仿真操作以及slam导航,这一节将实现脚本控制turtlebot3在多点之间来回导航。工程链接:……继续阅读 » 5年前 (2021-04-26) 2517浏览 0评论2878个赞
前言 《ros机器人编程实践》— 第五章动作的定义。 前面尝试了定义自己的消息类型和服务,接下来是定义动作。服务只适用于及时响应的消息类型,和编程的函数基本类似,有自己的输入输出。但是在解决机器人运作问题上服务显然就不够用了,就好比投篮,我们用服务来写只能做到写……继续阅读 » 5年前 (2021-04-26) 2198浏览 0评论2403个赞
前言 《ros机器人编程实践》第六章机器人与仿真 子系统概念 子系统:机器人通过建立子系统的方法来简化设计和分析过程。 执行子系统:直接与机器人轮子或者机械臂交互感知子系统:直接与传感器交互……继续阅读 » 5年前 (2021-04-26) 2625浏览 0评论2794个赞
前言 本文目标,史上最全,入门最简。工程链接:下载地址 这一节参考书上的例子,用gazo……继续阅读 » 5年前 (2021-04-26) 3185浏览 0评论1249个赞
前言 注意:因为版本原因没能成功操作R2,还在探索阶段,这里只是记录安装过程。 NASA的R2机器人已经在空间站成功的部署了,可是这个开源机器人在ros平台上的资源很少,估计都被人遗忘了,R2机器人拥有两条机械臂以……继续阅读 » 5年前 (2021-04-26) 2092浏览 0评论1848个赞
前言 本文讲解如何在游戏欧卡2中使用深度学习框架实现无人驾驶,为什么选择欧卡2?虽然ROS中也有真实汽车的仿真环境但是世界场景过于简单,而游戏欧……继续阅读 » 5年前 (2021-04-26) 2022浏览 0评论1035个赞
前言 因为我做《ros机器人编程实践》书上789章之前用的turtlebot3实践的,turtlebot3用的是激光雷达传感器,12章的巡线机器人用到了深度摄像头,所有无奈又只好装了turtlebot第一代来实验。 ros:kinetic Ubun……继续阅读 » 5年前 (2021-04-26) 2551浏览 0评论139个赞
前言 接上篇博客:ros机器人编程实践(12.1)- 用turtlebot仿真巡线机器人 <……继续阅读 » 5年前 (2021-04-26) 2850浏览 0评论1700个赞
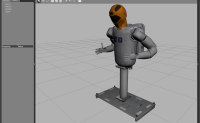
前言 这一节玩一玩ros中的fetch机器人,和它相似的是pr2机器人,pr2有两条胳膊。 fetch: ……继续阅读 » 5年前 (2021-04-26) 3063浏览 0评论693个赞
一、安装 语音识别安装参考文章:安装教程 ……继续阅读 » 5年前 (2021-04-26) 3039浏览 0评论2433个赞
一、前言 接上一篇博客:ros机器人编程实践(15.1)- 使用科大讯飞语音控制turtlebot导航 ……继续阅读 » 5年前 (2021-04-26) 2938浏览 0评论1157个赞
前言 上一篇博客:ros机器人编程实践(15.2)- 使用科大讯飞语音控制turtlebot导航 在上一篇博客中我们已经实现了语音……继续阅读 » 5年前 (2021-04-26) 2198浏览 0评论2366个赞
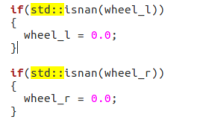
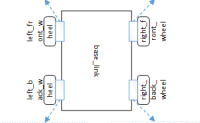
前言 之前用turtlebot仿真过巡线机器人,但是turtlebot略显笨重,为了纪念下本科参加的飞思卡尔,尝试着做一套ROS的仿真SmartCar。 ……继续阅读 » 5年前 (2021-04-26) 3004浏览 0评论1417个赞
前言 上一篇博客:ros机器人编程实践(16.1)- 仿真SmartCar之搭建模型 上一章已经成功搭建SmartCar模型,这一章在基础上做一些优化,并让他跑起来<……继续阅读 » 5年前 (2021-04-26) 1937浏览 0评论1781个赞
前言 上一篇博客:ros机器人编程实践(16.2)- 仿真SmartCar之模型“飞起来“ 上一章我们将模型导入到rv……继续阅读 » 5年前 (2021-04-26) 2173浏览 0评论1466个赞