基于快速扩展随机树(RRT / rapidly exploring random tree)的路径规划算法,通过对状态空间中的采样点进行碰撞检测,避免了对空间的建模,能够有效地解决高维空间和复杂约束的路径规划问题。该方法……继续阅读 » 5年前 (2021-04-26) 2471浏览 0评论837个赞
搜索区域 ……继续阅读 » 5年前 (2021-04-26) 2570浏览 0评论2427个赞
目录 一、VIO(Visual-Inertial Odometry)概述……继续阅读 » 5年前 (2021-04-26) 2670浏览 0评论1587个赞
一. 轨迹规划是什么? 在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划。运动规划一般又分为两步: 1、路径规划:在地图(栅格地图、四\八叉树、RRT地图等)中搜索一条从A点到B点的……继续阅读 » 5年前 (2021-04-26) 3043浏览 0评论1783个赞
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值。为了解决这些问题有两种思路: 思路一:把这些”期望“加入到优化问题中。 思路二:调整时间分配,来避免……继续阅读 » 5年前 (2021-04-26) 1951浏览 0评论2951个赞
@[toc]……继续阅读 » 5年前 (2021-04-26) 2422浏览 0评论572个赞
如果QP问题只有等式约束没有不等式约束,那么是可以闭式求解(close form)的。闭式求解效率要快很多,而且只需要用到矩阵运算,不需要QPsolver。 这里介绍Nicholas Roy文章中闭式求解的方法。1. QP……继续阅读 » 5年前 (2021-04-26) 2541浏览 0评论1321个赞
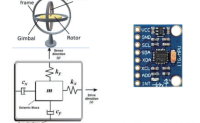
目录一、旋转运动学1.1 线速度与角速度1.2……继续阅读 » 5年前 (2021-04-26) 3624浏览 0评论1741个赞
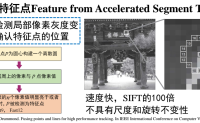
@[toc]一、ORB特征<……继续阅读 » 5年前 (2021-04-26) 3125浏览 0评论387个赞
@[toc]一、初始化特征匹配<……继续阅读 » 5年前 (2021-04-26) 2731浏览 0评论2772个赞
@[toc]1.……继续阅读 » 5年前 (2021-04-26) 2206浏览 0评论2078个赞
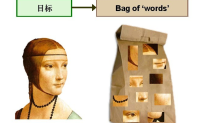
@[toc]一、词袋模型的引出<……继续阅读 » 5年前 (2021-04-26) 1964浏览 0评论126个赞