参考:http://wiki.ros.org/actionlib/DetailedDescription ……继续阅读 » 5年前 (2021-04-26) 3384浏览 0评论866个赞
第一步:TX2安装ROS kinetic http://www.ncnynl.com/archives/201706/1750.html 第二步:安装激光雷达驱动(测试过rplidar、F4)……继续阅读 » 5年前 (2021-04-26) 3024浏览 0评论2051个赞
参考:http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber(python) 1 编写Publisher节点 &……继续阅读 » 5年前 (2021-04-26) 2527浏览 0评论1445个赞
0 背景 我们使用ROS开发时,希望当机器人上电以后,会自动启动一些传感器的驱动文件,定位导航,建图所需要的文件,并能按照我们的设定实现一定的功能,比如相应客户端的命令,并按照客户端的指令来动作,或者开机以后,自动对所在的环境进行建图和导航等。我们……继续阅读 » 5年前 (2021-04-26) 1605浏览 0评论495个赞
参考:http://wiki.ros.org/cn/ROS/Tutorials/CreatingMsgAndSrv 参考:http://wiki.ros.org/cn/ROS/Tutorials/WritingServiceClient%28c%2B%2B%29 要……继续阅读 » 5年前 (2021-04-26) 2609浏览 0评论1405个赞
在用机器人和激光雷达跑SLAM算法构建地图时,总感觉激光雷达数据在RVIZ中显示的方向有问题(前提是激光雷达的安装方向正确),知道是tf坐标转换存在问题,但一直没有调整到好的状态,所以查了些相关资料,终于搞明白了ROS中的坐标转换是怎么回事,于是记录下来。 ……继续阅读 » 5年前 (2021-04-26) 2623浏览 0评论932个赞
首先了解在导航堆中,move_base包与其它包(如amcl、map_server)的关系,如图所示……继续阅读 » 5年前 (2021-04-26) 2451浏览 0评论2366个赞
注意:本文下载的tensoflow/model版本比较旧,是18年的版本,现在github上有更新,对代码和文件结构进行了一定的优化,因此下文的流程使用起来可能会与最新版本有所差异,大家要根据官方介绍灵活设置 1 源代码测试……继续阅读 » 5年前 (2021-04-26) 3077浏览 0评论343个赞
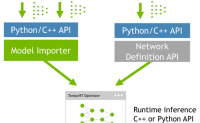
参考:https://arleyzhang.github.io/articles/7f4b25ce/ 1 什么是TensorRT 一般的深度学习项目,训练时为了加快速度,会使用多GPU分布式训练。但在部署推理时,为了降低成本,往往使……继续阅读 » 5年前 (2021-04-26) 2617浏览 0评论499个赞
参考:https://github.com/jkjung-avt/tf_trt_models/tree/tf-1.8 在……继续阅读 » 5年前 (2021-04-26) 3191浏览 0评论1148个赞
最近nvidia官网发布了专门针对tx2的tensorflow-gpu安装包,这样将TX2上部署tensorflow的难度大大降低,只需几个步骤即可。 1 刷机jetpack3.3首先TX2必须是3……继续阅读 » 5年前 (2021-04-26) 3266浏览 0评论152个赞
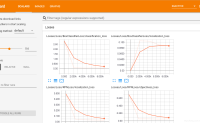
用tensorflow训练模型时,很自然的想到要同时验证模型的效果,得到mAP、loss等参数,从而判断什么时候可以终止训练,防止欠拟合或者过拟合。幸运的是,tensorflow官方已经给出了验证的脚本eval.py,网上找了很多资料,都没有人能把使用方法……继续阅读 » 5年前 (2021-04-26) 2615浏览 0评论2286个赞
在《TensorFlow之目标检测API接口调试(超详细)》文章中,介绍了tensorflow API接口调用方法,详细……继续阅读 » 5年前 (2021-04-26) 2426浏览 0评论809个赞
参考:https://blog.csdn.net/u010099080/ar……继续阅读 » 5年前 (2021-04-26) 2724浏览 0评论1163个赞
参考:https://github.com/juandes/pikachu-detection/blo……继续阅读 » 5年前 (2021-04-26) 2346浏览 0评论1935个赞