在写这篇教程之前,我想说的话 作为一名机器人队老队员,我深知技术传承的困难和重要。 对于标准平台组来说,时间还会浪费在前人已经弄懂的API甚至是有关代码格式的问题上,这对我们去深入开发是非常不利的。 对于服务机器人组来说,更需要有一个……继续阅读 » 5年前 (2021-04-26) 3027浏览 0评论1048个赞
这两天入校手续马上办完了,就要进组搬砖了。组里除了做3D激光SLAM,视觉IMU融合的学长,还有做传感器的和水下SLAM的。就着对各个方向多些了解进而发散思维的想法,从而去了解了水下SLAM。 ……继续阅读 » 5年前 (2021-04-26) 3557浏览 0评论1585个赞
先讨论滤波器的概念,滤波的意思是,让机器人在某个正确位置上对应的概率越高越好。也就是可以理解为:把错误位置上的概率滤低,把正确位置处的概率滤高。 假设一个机器人小R在如下场景中出现,他刚开始不知道自己在哪(小R还没看到他眼前的门),因此他在这个场景中任……继续阅读 » 5年前 (2021-04-26) 3572浏览 0评论2465个赞
摘要 ROS 导航堆栈对于移动机器人从一个地方移动到另一个地方是强大的可靠。导航堆栈的工作是通过处理来自测距、传感器和环境图的数据来产生让机器人执行的安全路径。最大限度地提高此导航堆栈的性能需要对参数进行一些精细的调整,这项工作并不像看起来那么简单。如果对概念和……继续阅读 » 5年前 (2021-04-26) 2521浏览 0评论747个赞
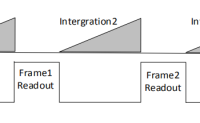
开始本文之前,先介绍几个基本概念。 1. 相机特性-曝光和读出 相机获取一帧图像分为曝光和读出两个阶段。相机使用的传感器不同,相机的曝光时间和读出时间的重叠关系也有所不同,分为交叠曝光和非交叠曝光两种。交叠曝光和非交叠曝光相……继续阅读 » 5年前 (2021-04-26) 2810浏览 0评论1995个赞