本章进入最为激动的机器人自主导航的学习,将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: 在机器人上使用传感器google-cartog……继续阅读 » 5年前 (2021-04-26) 3423浏览 0评论2020个赞
通过前面的基础学习,本章进入最为激动的机器人自主导航的学习。在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命。本章将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: 在机器人上使……继续阅读 » 5年前 (2021-04-26) 2887浏览 0评论553个赞
通过前面的基础学习,本章进入最为激动的机器人自主导航的学习。在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命。本章将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: ……继续阅读 » 5年前 (2021-04-26) 2052浏览 0评论2566个赞
通过前面的基础学习,本章进入最为激动的机器人自主导航的学习。在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命。本章将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: 在机器人上使……继续阅读 » 5年前 (2021-04-26) 1934浏览 0评论1280个赞
通过前面的基础学习,本章进入最为激动的机器人自主导航的学习。在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命。本章将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: 在机器人上使……继续阅读 » 5年前 (2021-04-26) 1669浏览 0评论1841个赞
摘要 由于机器人SLAM、自动导航、语音交互这一系列算法都在机器人操作系统ROS中有很好的支持……继续阅读 » 5年前 (2021-04-26) 3194浏览 0评论2259个赞
摘要 由于机器人SLAM、自动导航、语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码;而ROS又是安装在Linux发行版ubuntu系统之上的,先学一些Linux命令行相关的知识,对后续ROS教程的快速上手……继续阅读 » 5年前 (2021-04-26) 3137浏览 0评论1698个赞
摘要 由于机器人SLAM、自动导航、语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码;而ROS又是安装在Linux发行版ubuntu系统之上的,先学一些Linux命令行相关的知识,对后续ROS教程的快速上手……继续阅读 » 5年前 (2021-04-26) 1916浏览 0评论1756个赞
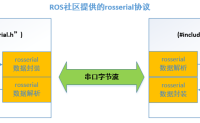
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 5年前 (2021-04-26) 3276浏览 0评论2164个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 5年前 (2021-04-26) 3408浏览 0评论2536个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 5年前 (2021-04-26) 2935浏览 0评论851个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 5年前 (2021-04-26) 3403浏览 0评论2056个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 5年前 (2021-04-26) 2737浏览 0评论1681个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 5年前 (2021-04-26) 2331浏览 0评论543个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 5年前 (2021-04-26) 3189浏览 0评论2311个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 5年前 (2021-04-26) 1870浏览 0评论2176个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 5年前 (2021-04-26) 2842浏览 0评论2835个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 5年前 (2021-04-26) 3093浏览 0评论2348个赞
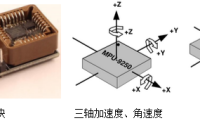
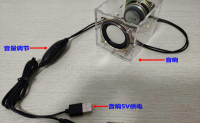
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 5年前 (2021-04-26) 3312浏览 0评论328个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 5年前 (2021-04-26) 1929浏览 0评论2628个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 5年前 (2021-04-26) 2065浏览 0评论2960个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 5年前 (2021-04-26) 1667浏览 0评论2937个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 5年前 (2021-04-26) 3131浏览 0评论1931个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 5年前 (2021-04-26) 2285浏览 0评论770个赞
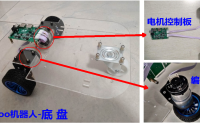
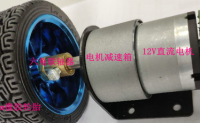
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 5年前 (2021-04-26) 2294浏览 0评论1856个赞
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 5年前 (2021-04-26) 1766浏览 0评论918个赞
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 5年前 (2021-04-26) 1641浏览 0评论1439个赞
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 5年前 (2021-04-26) 2532浏览 0评论438个赞
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 5年前 (2021-04-26) 2022浏览 0评论1680个赞
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 5年前 (2021-04-26) 2824浏览 0评论247个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: ……继续阅读 » 5年前 (2021-04-26) 2264浏览 0评论1847个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 5年前 (2021-04-26) 2343浏览 0评论754个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 5年前 (2021-04-26) 3243浏览 0评论2231个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 5年前 (2021-04-26) 2438浏览 0评论615个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 5年前 (2021-04-26) 3497浏览 0评论546个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 5年前 (2021-04-26) 2565浏览 0评论532个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 5年前 (2021-04-26) 2794浏览 0评论1876个赞
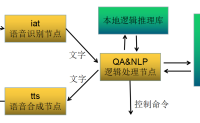
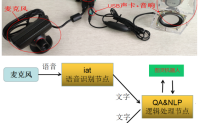
摘要 这一章将进入机器人语音交互的学习,让机器人能跟人进行语音对话交流。这是一件很酷的事情,本章将涉及到语音识别、语音合成、自然语言处理方面的知识。本章内容: 1.语音交互相关技术 2.机器人语音交互实现 3.自然语言处理云计算……继续阅读 » 5年前 (2021-04-26) 1564浏览 0评论2430个赞
摘要 这一章将进入机器人语音交互的学习,让机器人能跟人进行语音对话交流。这是一件很酷的事情,本章将涉及到语音识别、语音合成、自然语言处理方面的知识。本章内容: 1.语音交互相关技术 2.机器人语音交互实现 3.自然语言处理云计算……继续阅读 » 5年前 (2021-04-26) 1915浏览 0评论1791个赞
摘要 这一章将进入机器人语音交互的学习,让机器人能跟人进行语音对话交流。这是一件很酷的事情,本章将涉及到语音识别、语音合成、自然语言处理方面的知识。本章内容: ……继续阅读 » 5年前 (2021-04-26) 2261浏览 0评论1609个赞
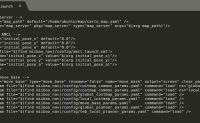
0.安装步骤预览 (1)系统默认自带python2.x,所以需要先安装python3.x (2)python2对应pip,python3对应pip3,用源码安装python3后pip3也自动安装了 (3)用pip3安装virtualenv (4)用virtual……继续阅读 » 5年前 (2021-04-26) 2183浏览 0评论511个赞
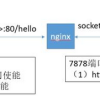
android要与ROS通讯,一种是基于rosbridge,另一种是基于rosjava库。 相关参考例子工程 ……继续阅读 » 5年前 (2021-04-26) 2586浏览 0评论494个赞
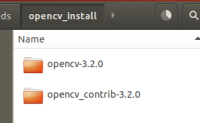
由于最近要在OpenCV3中使用SIFT和SURF特征提取,而自从OpenCV2升级到OpenCV3版本后,SIFT、SURF等这些算法都被移出opencv默认项目库,而被放到叫opencv_contrib的项目库。因此需要手动下载opencv和opencv_contrib的源码……继续阅读 » 5年前 (2021-04-26) 2697浏览 0评论1991个赞