AMCL中轮式里程计误差模型参数用了很久的AMCL,也偶尔会思考odom_alpha1,odom_alpha2,odom_alpha3,odom_alpha4这些如何参数如何根据我们轮子的精度来给出理论……继续阅读 » 5年前 (2021-04-26) 3339浏览 0评论2391个赞
AMCL首次启动总有个烦恼的问题,就是手动初始化位姿很难给出准确的,也不会自动更新,像下面这样 像这样做成产品当然不行啦。解决上面的问题主要有两个思想(1)用户给个大概初始位姿,算法自动更新寻找真实值(2……继续阅读 » 5年前 (2021-04-26) 3167浏览 0评论2357个赞
问题的引出:AMCL的初始位姿通常要求用户手动输入,或者机器加载上一次保存的位姿。AMCL中自带的全局定位服务(globalLocalizationCallback)实际中基本很难用得上。问题解决思路:相机……继续阅读 » 5年前 (2021-04-26) 2288浏览 0评论1685个赞
……继续阅读 » 5年前 (2021-04-26) 2798浏览 0评论899个赞
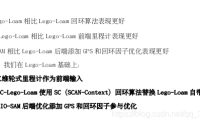
1.序言倒腾一段时间的LIO-SAM,实在是累,是那种没任何收获的感觉。吐槽几点……继续阅读 » 5年前 (2021-04-26) 3537浏览 0评论2389个赞
这篇博客主要是一些调试中踩的坑及验证过的东西,以供大家参考。1.GTSAM使用篇……继续阅读 » 5年前 (2021-04-26) 2760浏览 0评论557个赞